

Stereoscopic vision based gesture body-sense control system
A technology of stereo vision and somatosensory control, applied in the fields of video image processing and human-computer interaction technology, to achieve the effect of solving the defects that cannot be transplanted
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Below in conjunction with the accompanying drawings, the gesture somatosensory control system based on stereo vision of the present invention is designed to solve technical problems such as distance measurement and positioning, user-defined gesture somatosensory action, multi-gesture somatosensory action recognition, dynamic gesture somatosensory action recognition, and embedded independent control. The optimal way of the technical solution adopted is further explained:
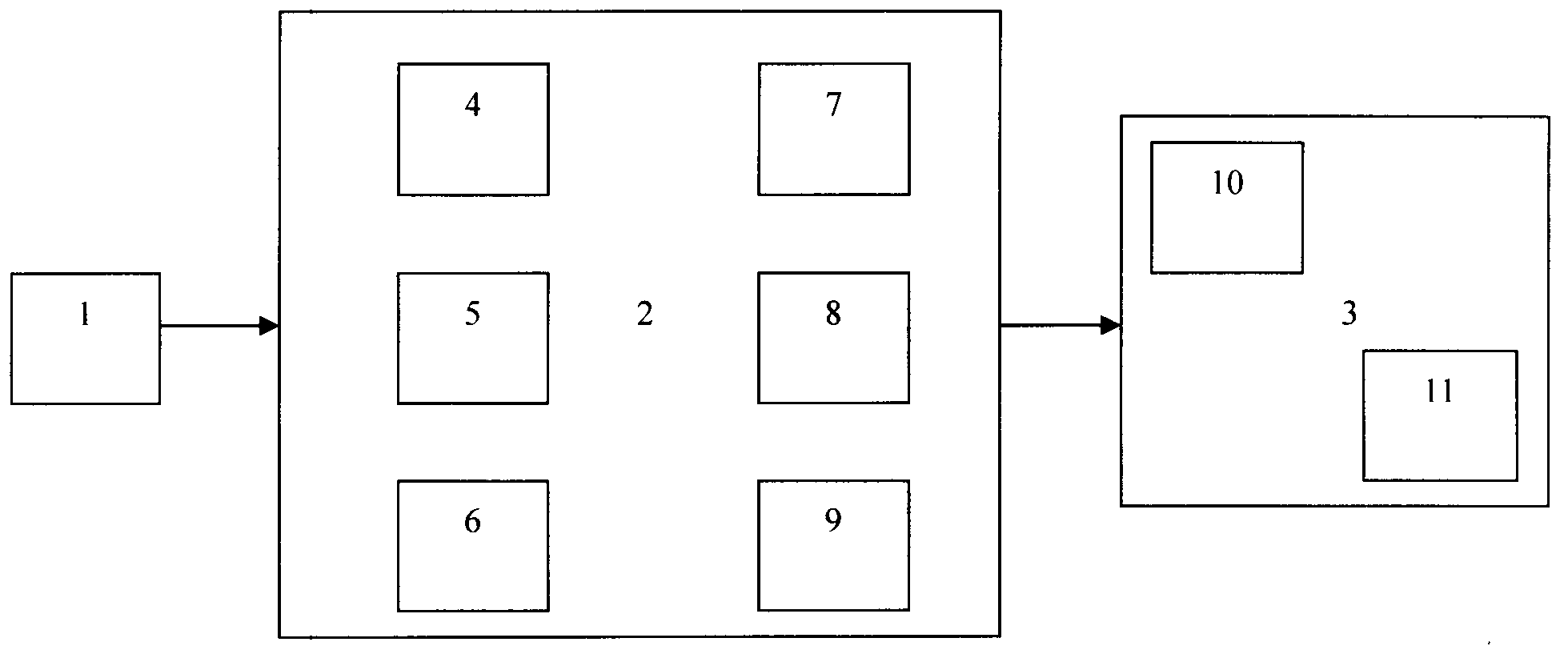
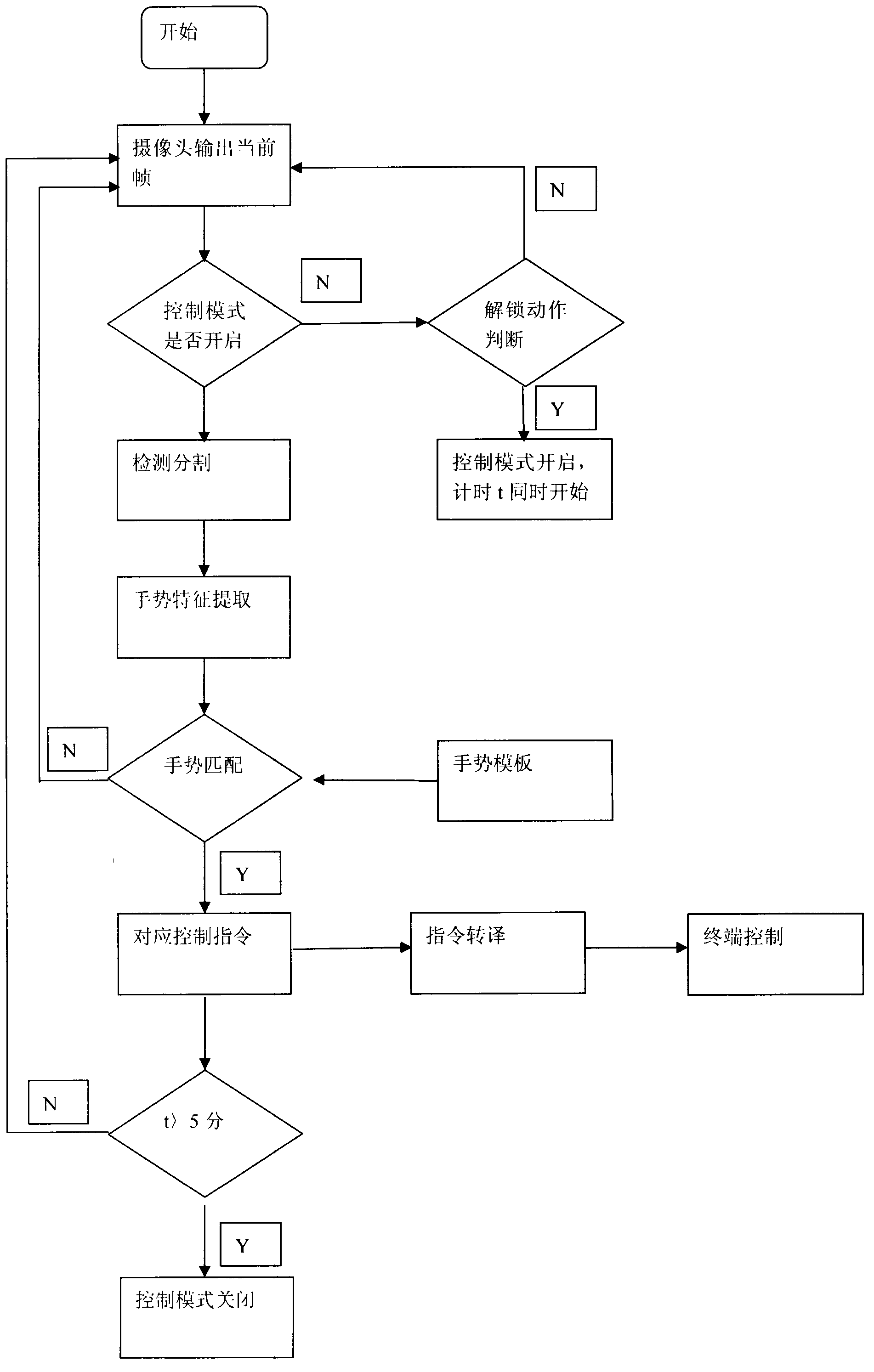
[0018] see figure 1 and 2 , the present invention provides a gesture somatosensory control system based on stereo vision, comprising: a binocular video probe 1, a gesture somatosensory recognition unit 2 and a control unit 3; Recognition unit 2; Gesture somatosensory recognition unit 2 detects and recognizes gesture somatosensory actions, and outputs recognition results to control unit 3; and control unit 3 converts gesture and body sensations into control instructions to realize corresponding operati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More