

Filtering backstepping ship movement control system based on self-adaption fuzzy estimator
A technology of self-adaptive fuzzy control system, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., to achieve the effect of simple form, enhanced suppression ability, and improved robust performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in detail below:
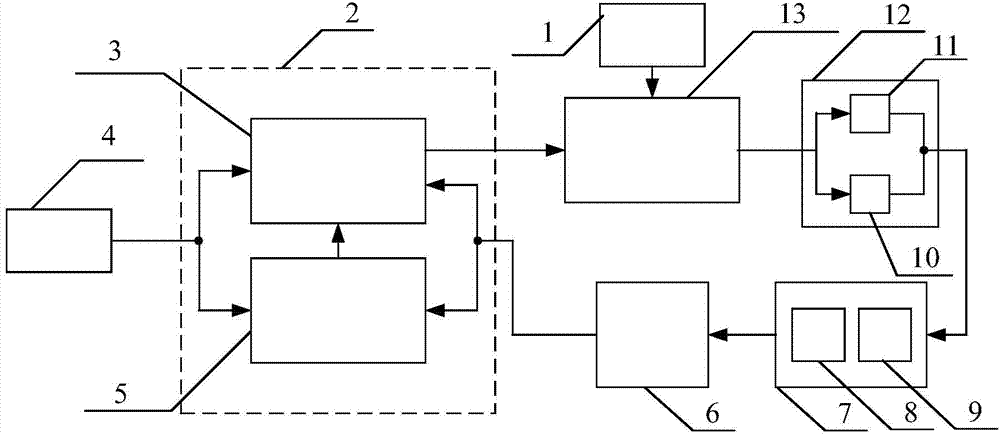
[0025] figure 1 The overall structure of the filter backstepping ship motion control system based on the adaptive fuzzy estimator of the present invention is given. figure 1 The meanings of the numbers in are as follows: 1—Environmental disturbance; 2—Control system; 3—Filter backstepping controller; 4—Guidance system; 5—Adaptive fuzzy estimator; 6—Diffeomorphic converter; 7— Data processing system; 8—filtering system; 9—data fusion system; 10—speed sensor; 11—position and attitude sensor; 12—sensor system; 13—ship.
[0026] combine figure 1 , The filtering backstepping ship motion control system based on the adaptive fuzzy estimator of the present invention includes a control system 2 , a guidance system 4 , a diffeomorphic converter 6 , a data processing system 7 , and a sensor system 12 . The pose sensor 11 in the sensor system 12 collects the actual pose of the ship, packs and transmits to the data processing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More