

Visual positioning method of mobile manipulator
A technology of visual positioning and mobile operation, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of bonding phenomenon, improper placement of workpieces, positioning errors, etc., to ensure material transportation, stabilize material transportation, and improve robustness. performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
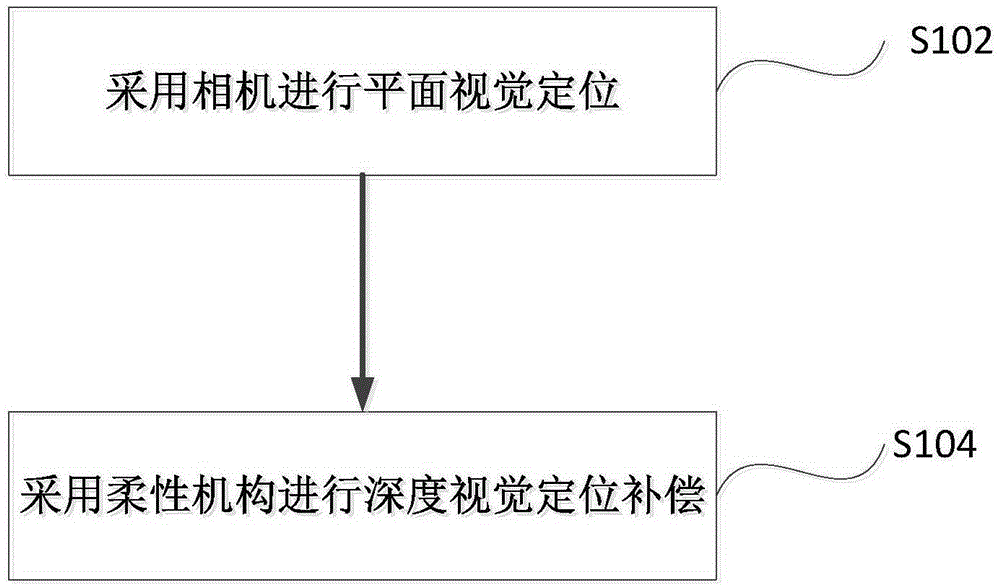
Method used
Image

Examples
Embodiment Construction
[0034] The technical problems solved by the embodiments of the present invention, the technical solutions adopted and the technical effects achieved are clearly and completely described below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present application, not all of them. Based on the embodiments in the present application, all other equivalent or obviously modified embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention. Embodiments of the invention can be embodied in many different ways as defined and covered by the claims.
[0035] It should be noted that, in the following description, many specific details are given for the convenience of understanding. It may be evident, however, that the present invention may be practiced without these specific details.
[0036] It should be no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More