

Material edge detecting method of tooling
An end picker and material grouping technology, applied in the field of robotics, can solve the problems of large amount of calculation, complex calculation, not simple and direct enough, etc., and achieve the effect of high operation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
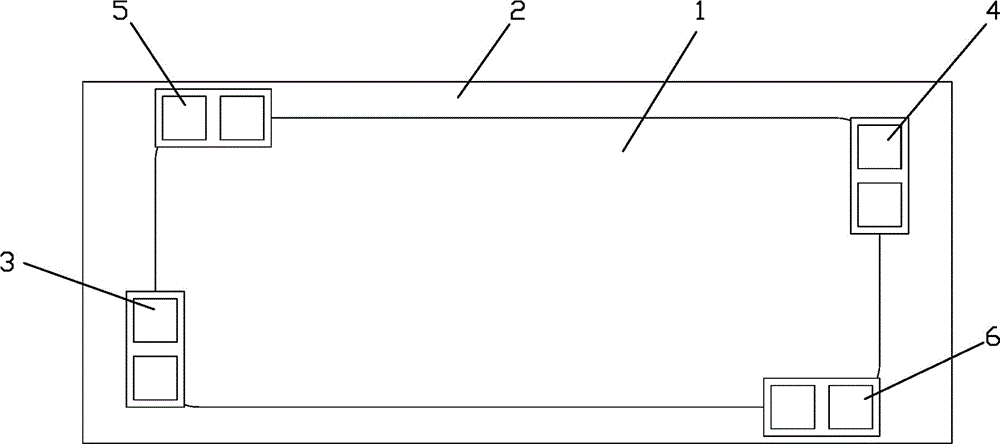
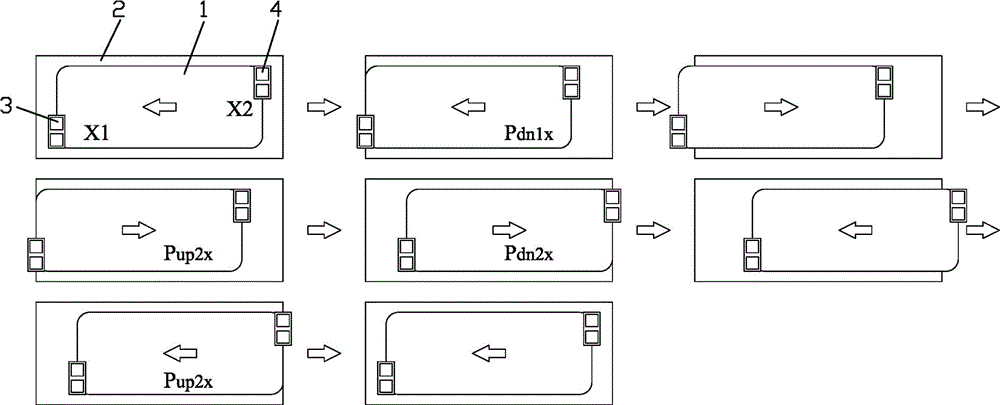
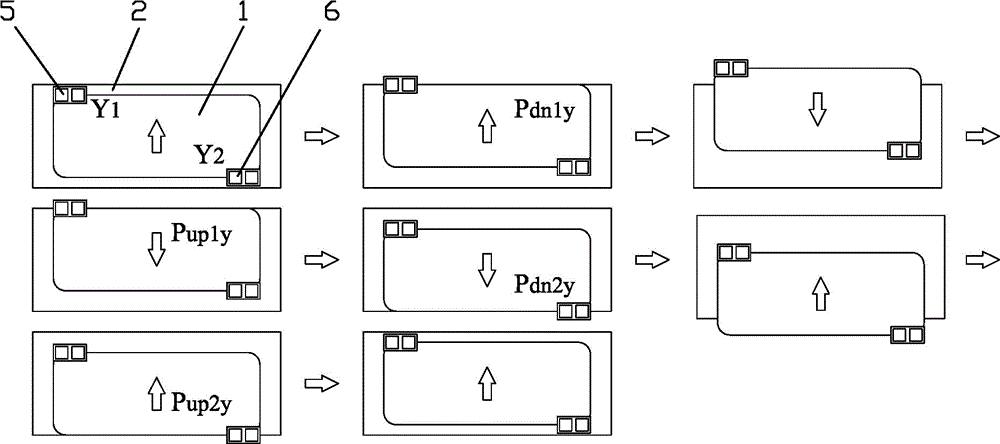
[0026] see Figure 1 to Figure 4 , the end picker of the present invention detects the edge of the group of materials, a group of edge sensors are respectively arranged in the X and Y directions of the end picker 1 to detect the edge position of the group material 2, and each group of edge detection The sensor has two sensors 3 to 6, which are installed at the diagonal position of the end picker 1; the edge measuring sensor is a photoelectric sensor, and its measuring direction, transmitting and receiving direction are perpendicular to the measuring side; The two directions of X and Y reciprocate at least once in order to obtain the position of the edge of the assembly 2, and the reciprocating stroke is ±50mm~±100mm; the lower part of the end picker 1 connected to the robot flange is provided with two end pickers for calibration. 1 Two sets of calibration sensors 7 for the positions of edge sensors 3-6.
[0027] After the edge measuring sensors 3 and 4 (X1, X2) reciprocate in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More