

Portable energy-storage type external skeleton assisting robot
An energy storage type and exoskeleton technology, applied in the field of robotics, can solve the problems of poor wearing comfort, reduced human body load capacity, poor environmental adaptability, etc., and achieve the effects of improving battery life, enhancing versatility, and reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
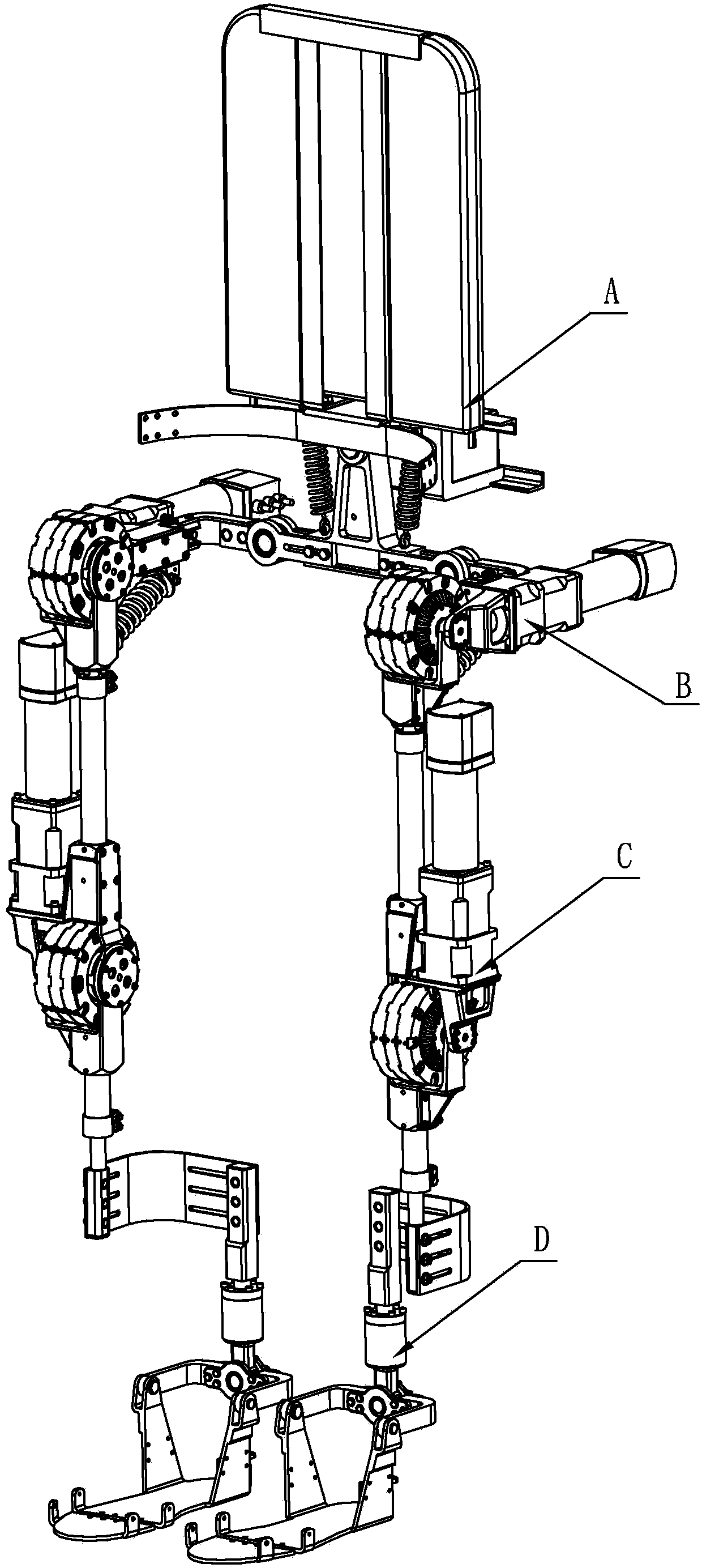
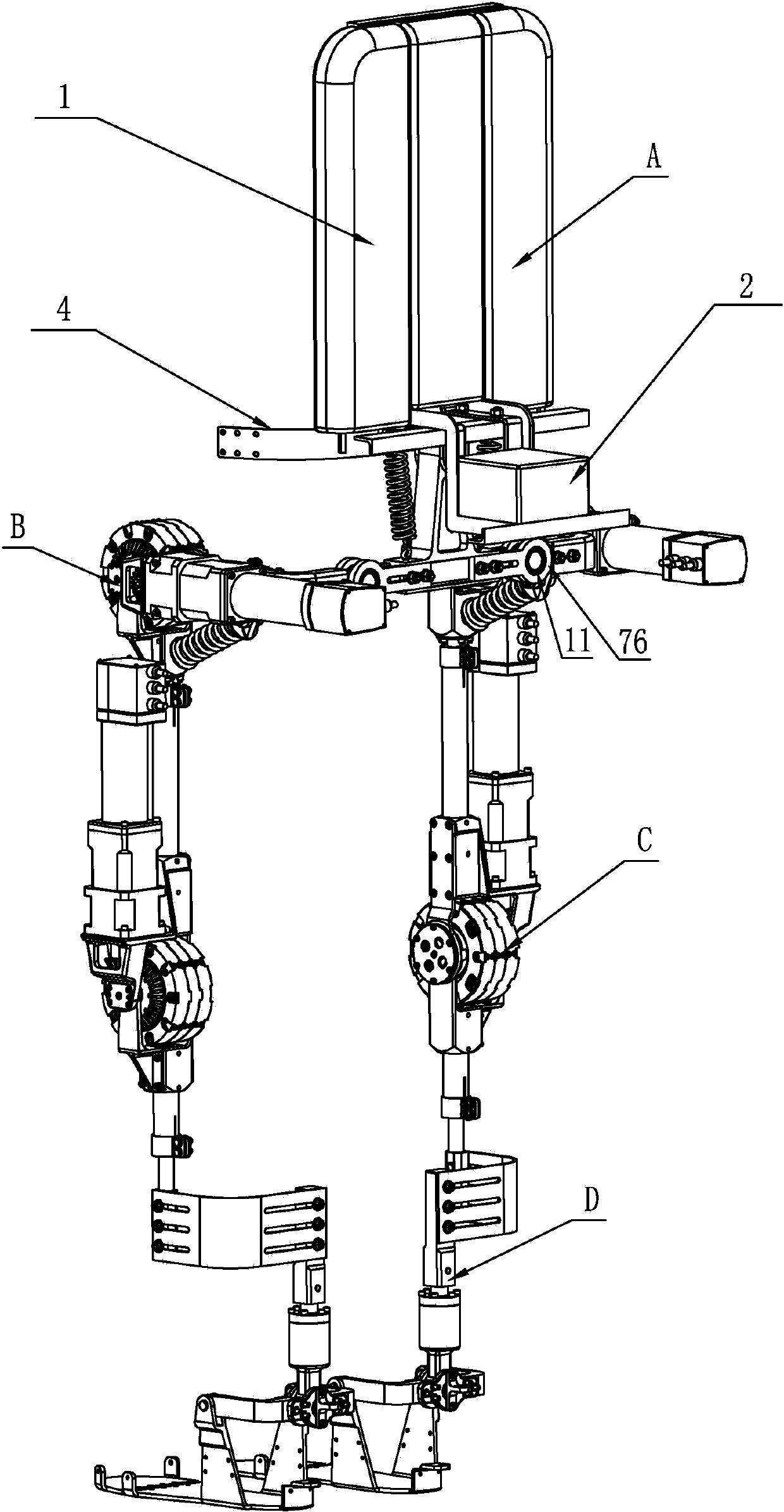
[0022] Specific implementation mode one: combine Figure 1-Figure 16 Explain that a portable energy storage exoskeleton power-assisted robot in this embodiment includes an upper body back A, a left leg and a right leg, and the left leg and the right leg respectively include a hip driving system B, a thigh driving system C and a calf wearing system D ;
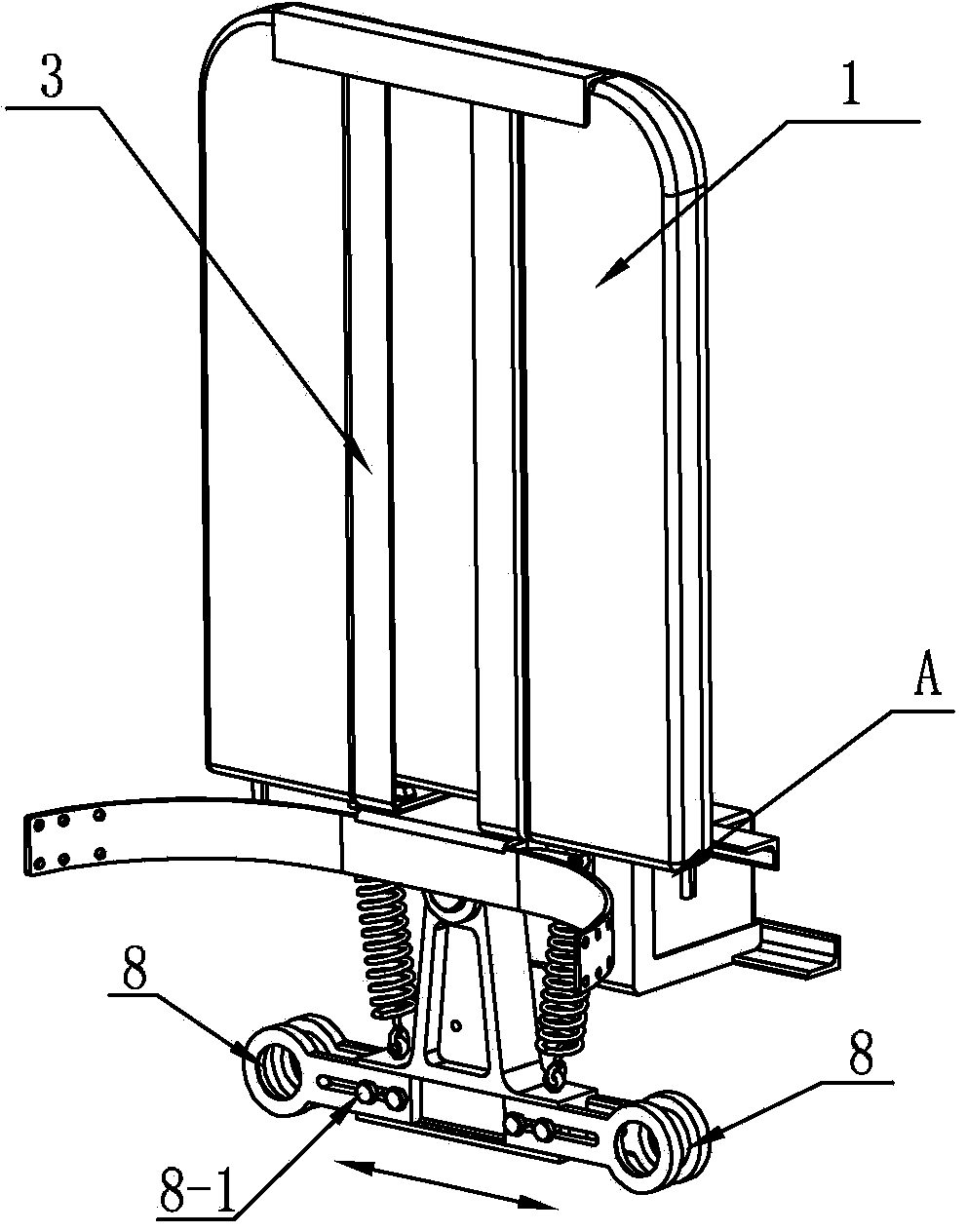
[0023] The back of the upper body A includes a back bracket 3, a back belt 4, a waist rear rotating plate 5, a waist rear connecting plate 7, an adjustment connecting plate 8, a host computer 2, a power module 1 and two first springs 10; The back connecting plate 7 is an inverted T-shaped waist rear connecting plate; the back waist belt 4 is fixed on the horizontally arranged waist rear rotating plate 5, and the back support 3 is fixed on the upper surface of the waist rear rotating plate 5. The upper computer 2 and the power module 1 are fixedly installed on the bracket 3, the lower end surface of the waist rear side rotating...
specific Embodiment approach 2
[0029] Specific implementation mode two: combination Figure 11-Figure 15 Explain that the series elastic assembly 58 in this embodiment includes a plurality of series elastic bodies 54, each series elastic body 54 includes an inner ring 59, an outer ring 61 and ten third springs 57, and the outer wall of the inner ring 59 is uniformly distributed along its circumference. Five outer card seats 60 are arranged on the cloth, five inner card seats 61-1 are evenly distributed along its circumference on the inner wall of the outer ring 61, the inner ring 59 and the outer ring 61 are coaxially arranged, and the outer ring 61 is set in the inner ring 59 On, five outer card holders 60 and five inner card holders 61-1 are alternately arranged, and a third spring 57 is installed between each inner card holder 61-1 and an adjacent outer card holder 60. A plurality of claws 61-2 are processed in the axial direction on the outer ring 61 of one of the series elastic bodies 54 of the two ser...
specific Embodiment approach 3
[0031] Specific implementation mode three: combination Figure 13 Explain that the inner ring 59 of the series elastic body 54 at the other end of the series elastic assembly 58 of this embodiment is processed with a plurality of second grooves 59-1, and the knee joint connecting plate 44 is processed with a plurality of second grooves 59-1. 1. The same number of protrusions 44-1, and the protrusions 44-1 are engaged in the corresponding second grooves 59-1.
[0032] The beneficial effect of this embodiment is: the series elastic body and the knee joint connecting plate are connected through the protrusion and the groove to realize torque transmission, the structure is more compact, and the flexible deformation is good. Others are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More