

Wearable lower limb power-assisting device and control method thereof
A power-assisting device and wearable technology, which can be used in appliances to help people walk, medical science, prostheses, etc., can solve problems such as limitation of limb movement range, and achieve the effects of simple control, simple structure and good followability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
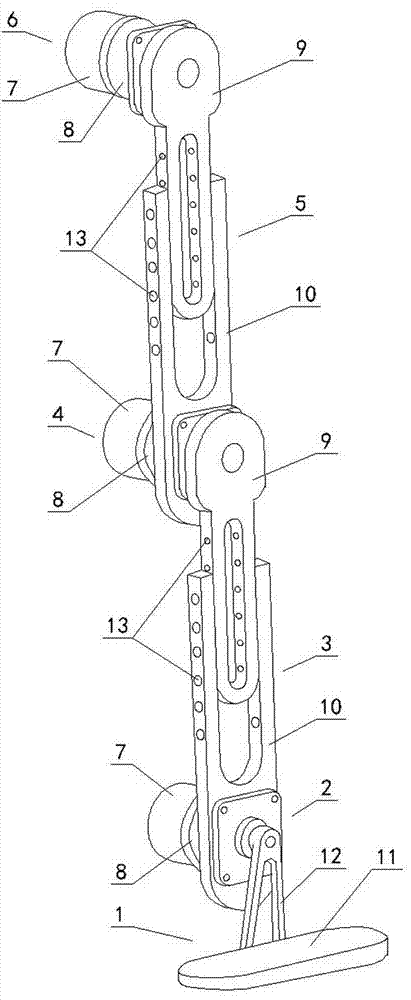
[0026] Such as Figure 1-Figure 2 As shown, the wearable lower limb assisting device according to the present invention is composed of two sets of three-degree-of-freedom mechanisms arranged symmetrically, and each set of three-degree-of-freedom mechanisms respectively includes sole fixing mechanisms 1, Ankle joint mechanism 2, calf aluminum plate 3, knee joint mechanism 4, thigh aluminum plate 5, hip joint mechanism 6, and a fixed bracket that can be used to bear loads. A foot motion detection module is connected to the sole fixing mechanism 1. On the fixed bracket A power supply is provided.
[0027] Wherein, the ankle joint mechanism 2, the knee joint mechanism 4 and the hip joint mechanism 6 are respectively composed of a DC motor 7 electrically connected to the power supply and a reducer 8 connected with the rotating shaft of the DC motor 7, wherein the ankle joint mechanism is formed The DC motor 7 and the reducer 8 of 2 are installed and fixed on the lower end of the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More