Quadruped robot leg with elastic four-rod mechanism
A four-legged robot and four-bar mechanism technology, which is applied in the directions of motor vehicles, transportation and packaging, can solve the problems of low utilization rate and energy waste, and achieve the effects of simple structure, reduced impact force, and convenient movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific implementation will be further described below in conjunction with the accompanying drawings.
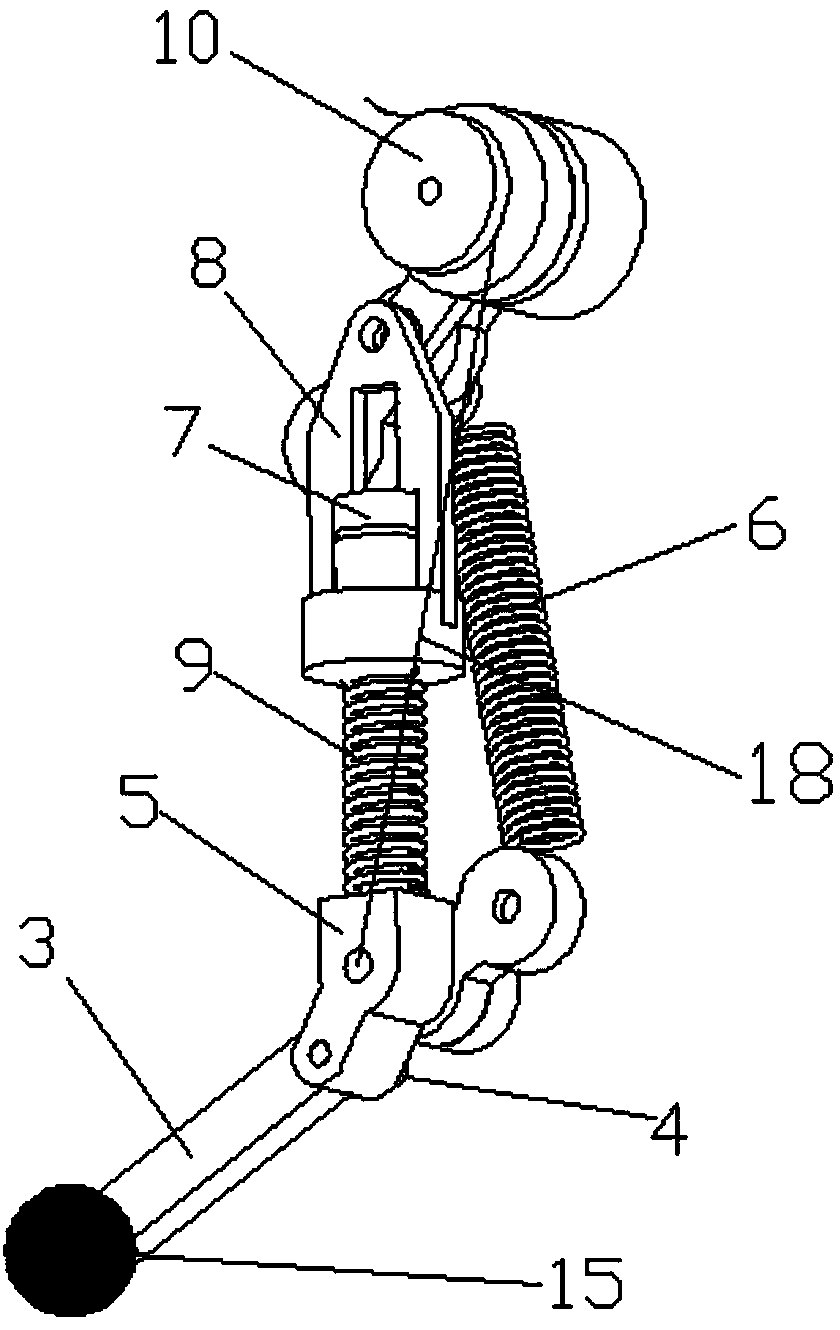
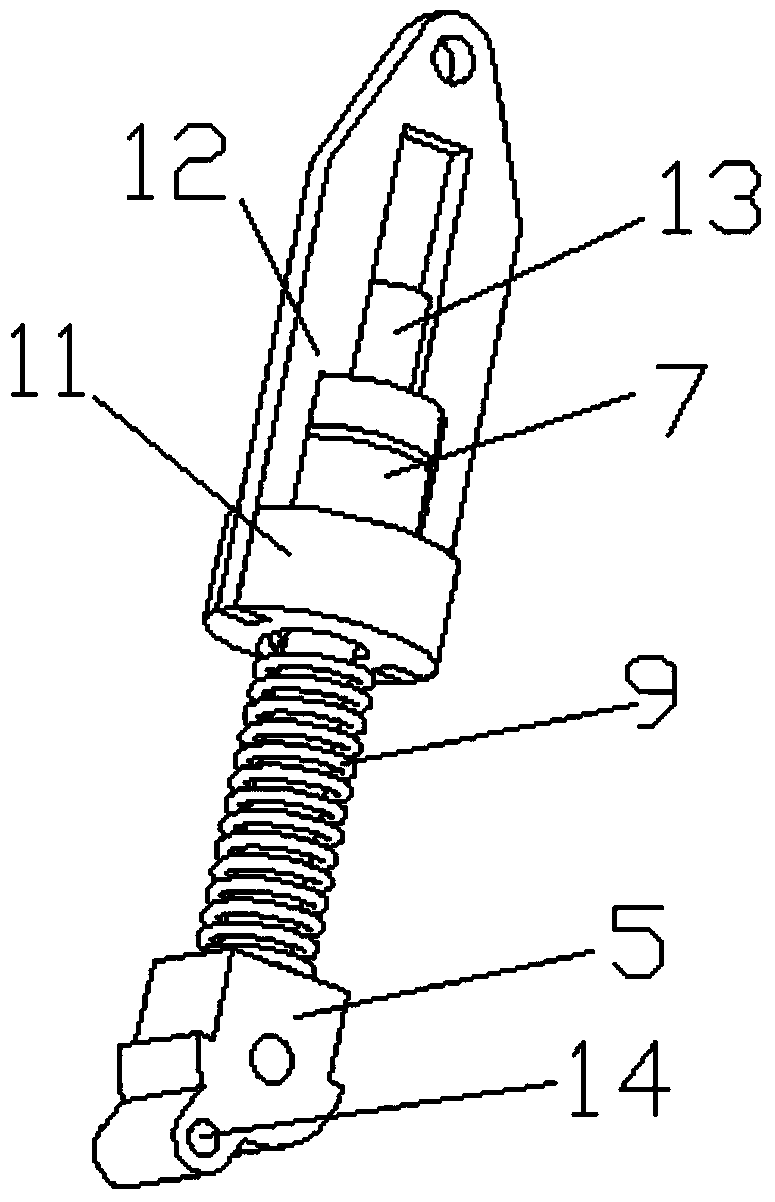
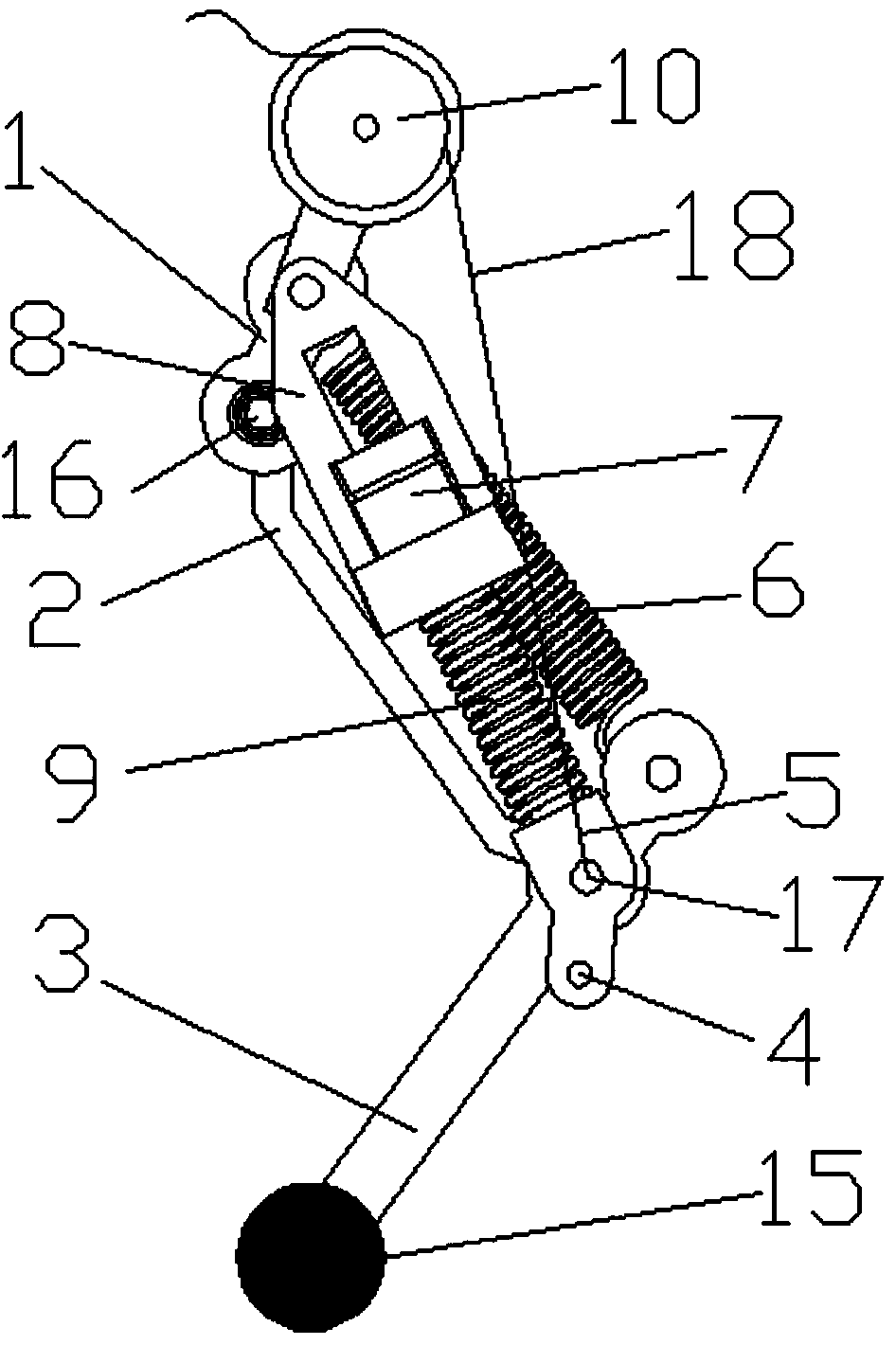
[0021] Such as figure 1 As shown: the leg structure is composed of a thigh 1, a calf 2, a foot 3, a tension spring 6, a buffer device 8, and a winding wheel 10. One end of the thigh 1 is installed on the output shaft of the power source to form a hip joint, and the winding wheel 10 is installed on one end of the thigh, the axis of the reel 10 is in line with the axis of the hip joint rotation joint, the other end of the thigh 1 is connected with one end of the calf 2 to form a knee joint 16, and the other end of the calf 2 and the foot 3 are in a certain position. The position is connected to form an ankle joint 17, and a rubber spherical foot 15 is installed at the ground-touching end of the foot 3. This spherical foot has elasticity, and the bearing frame 12 of the buffer device 8 is installed on one-third of the thigh to form a rotating pair. The installation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More