Flexible follow-up control method for spacecraft mechanical arm
A technology for manipulators and spacecraft, applied in the control field of manipulators, can solve problems such as difficult installation work, long adjustment time, and difficulty in controlling installation accuracy, and achieve the effects of solving assembly problems, intuitive operation, and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
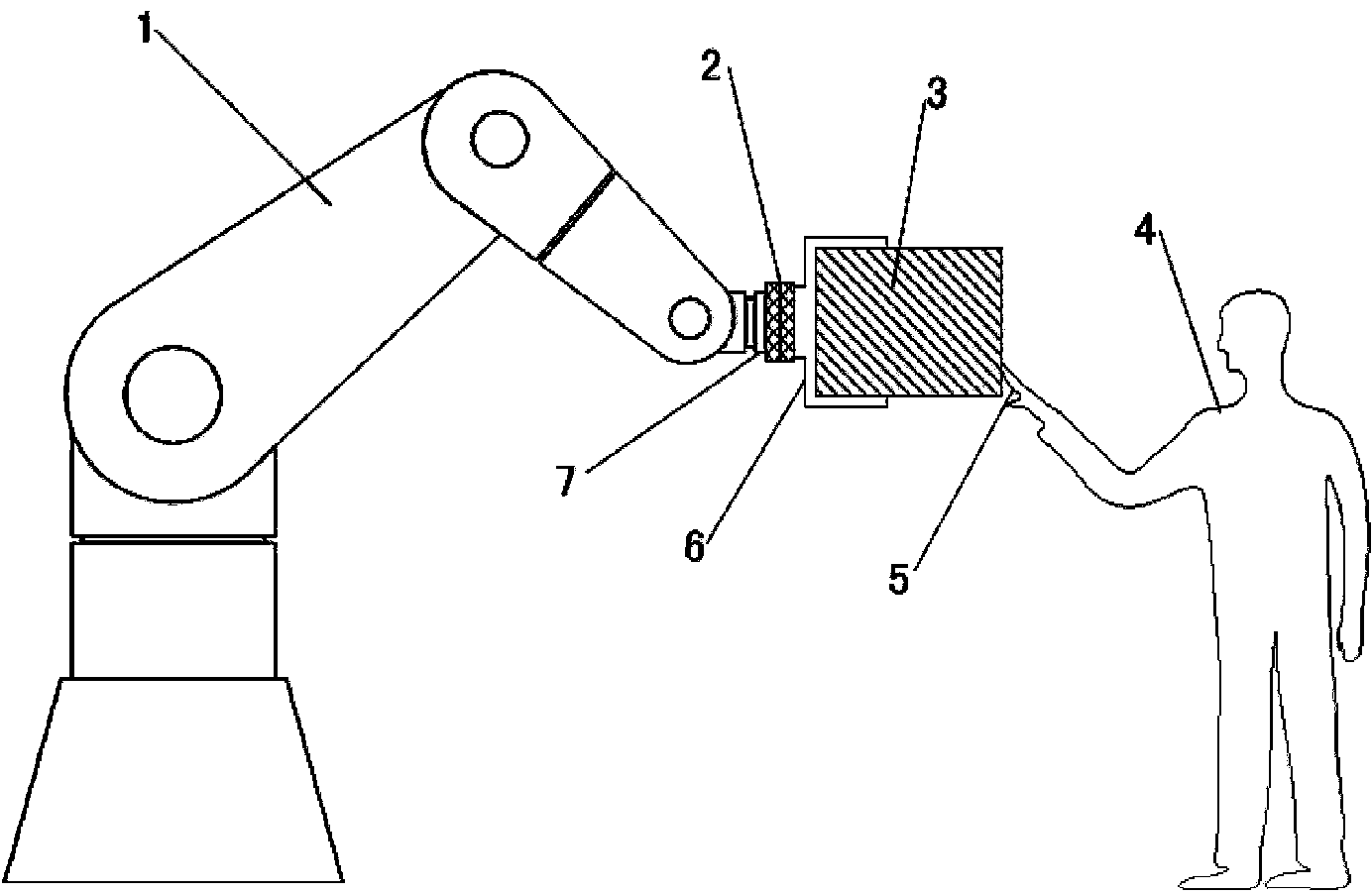
[0036] Such as figure 1 As shown, the six-axis force sensor 2 is installed between the end flange 7 of the mechanical arm 1 and the clamp 6 , the operated part 3 is clamped by the clamp 6 , and the operator 4 pushes the operated part 3 with his hand 5 . The combination of the operated part 3 and the fixture 6 is the load of the six-dimensional force sensor 2. According to the "Spacecraft Manipulator Flexible Follow-up Control Gravity Compensation Method", the gravity and the center of gravity position of the operated part 3 and the fixture 6 are pre-set. Equal gravity information is measured and used for gravity compensation in flexible follow-up control. For the specific gravity compensation method of spacecraft manipulator flexible follow-up control, refer to Chinese patent 201310552492.0.
[0037] The control system (not shown in the figure) acquires the force and moment information sensed by the six-dimensional force sensor 2 in real time, and the force and moment informat...
Embodiment approach 2
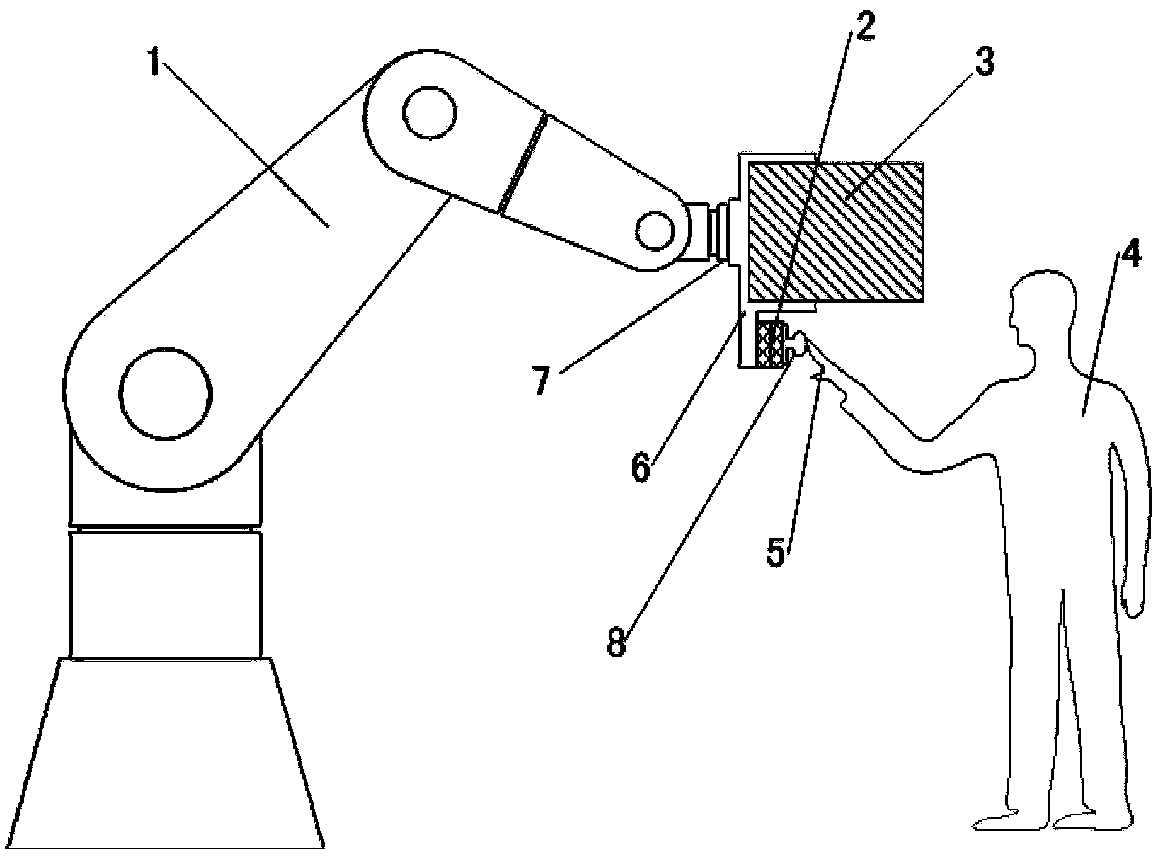
[0046] Such as figure 2 As shown, the clamp 6 is directly installed on the end flange 7 of the mechanical arm 1, the operated part 3 is clamped by the clamp 6, the six-dimensional force sensor 2 is installed on the clamp 6, and the operating handle 8 is fixedly connected to the six-dimensional force sensor 2 , The operator 4 acts on the operating handle 8 with his hand 5 .
[0047] The difference between this embodiment and Embodiment 1 is that the six-dimensional force sensor 2 does not bear the gravity of the operated part 3 and the clamp 6, and the gravity of the operating handle 8 is small, so that the interference caused by the six-dimensional force sensor 2 sensing the action of the hand 5 can be reduced. Neglected, gravity compensation is not performed in the flexible servo control, and the six-dimensional force sensor 2 can directly sense external force information. The rest are the same as Embodiment 1.
[0048] Among them, the six-dimensional force sensor is a wel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com