

Method for object identification and three-dimensional pose measurement of complex surface
A target recognition, three-dimensional pose technology, applied in multi-disciplinary fields, can solve the problems of waste of resources, difficult positioning, unfavorable engineering applications, etc., to achieve the effect of improving the level of intelligence, avoiding repeated calculations, and improving real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
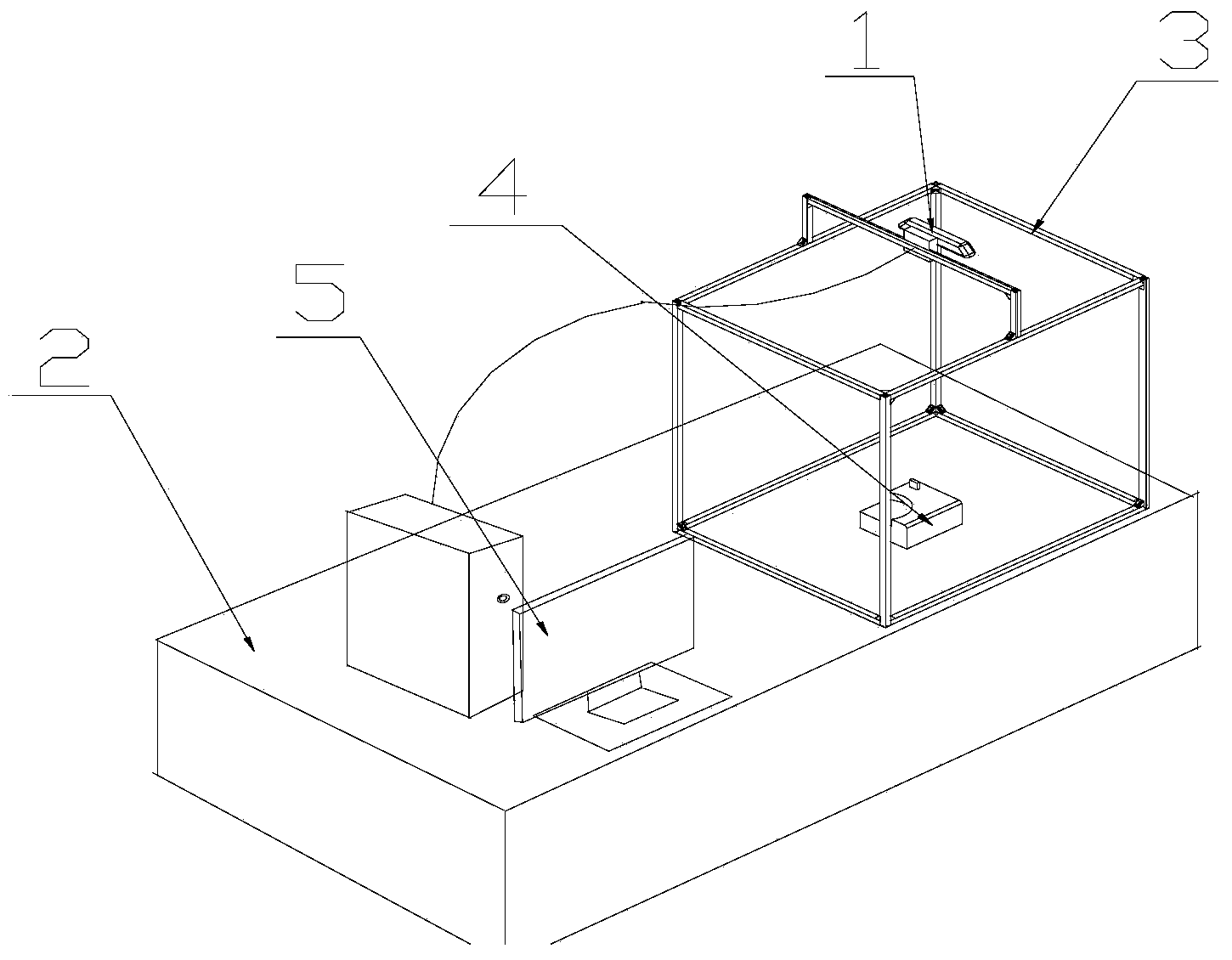
[0030] The specific implementation of the present invention will be described below in conjunction with the accompanying drawings. like Figure 1-2 As shown, a method for complex curved surface target recognition and three-dimensional pose measurement, using a complex curved surface target recognition and three-dimensional pose measurement device for information acquisition, the complex curved surface target recognition and three-dimensional pose measurement device includes a plane workbench 2 , support frame 3, body sensor 1 and computer 5, described support frame 3 is placed on the flat workbench 2, and described body sensor 1 is installed on the cross bar of support frame 3 tops, body sensor 1 communicates with by data line computer 5 connection;
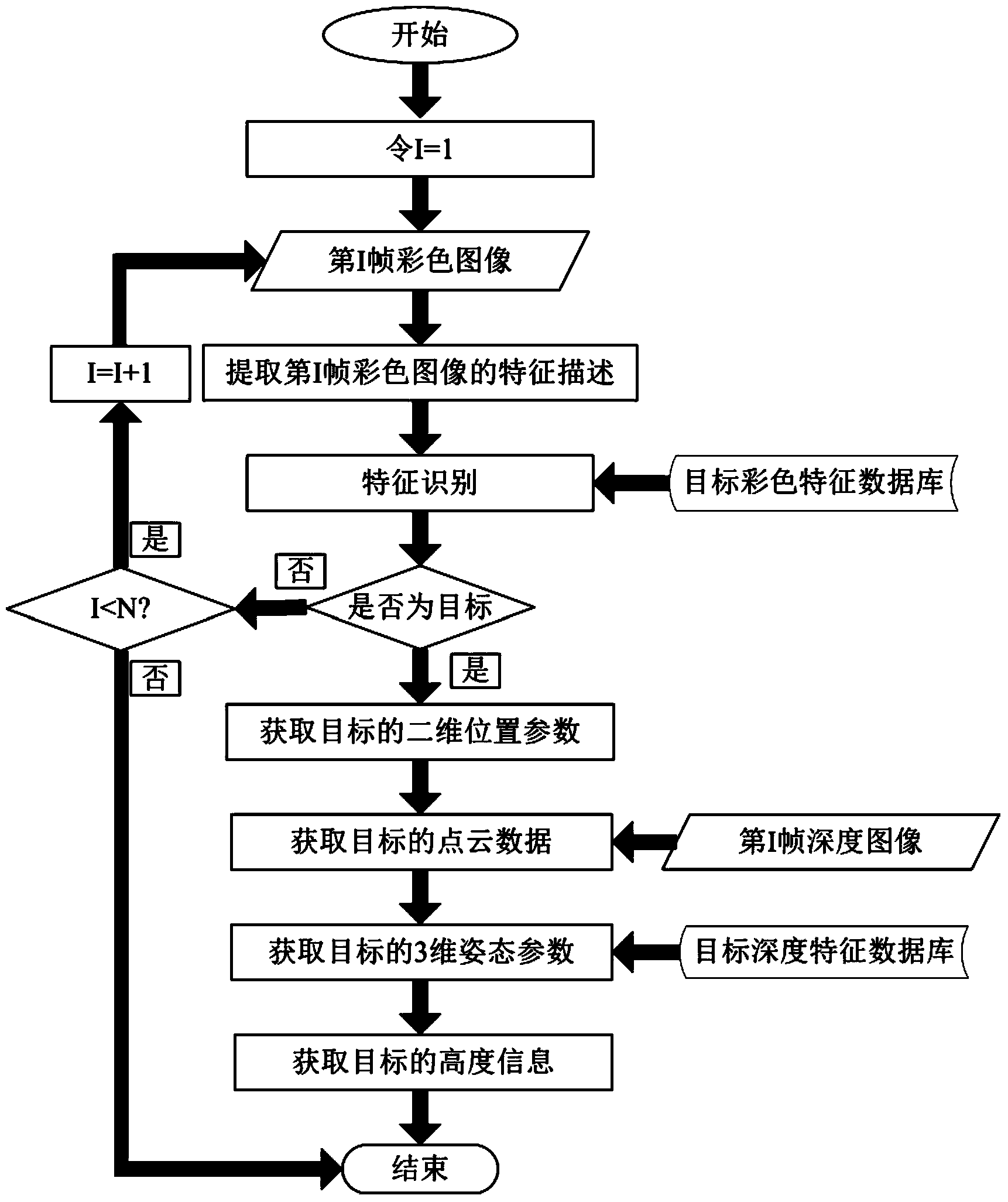
[0031] The specific method includes the following steps:
[0032] A. Offline establishment of target feature database
[0033] Establishing a target feature database through an off-line process, the target feature database com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More