

Arm frame control method, equipment and system and engineering machine
A control method and technology for controlling equipment, applied in the direction of using feedback control, etc., can solve problems such as frequent booms, affecting the operation of the boom, and inability to effectively control the boom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
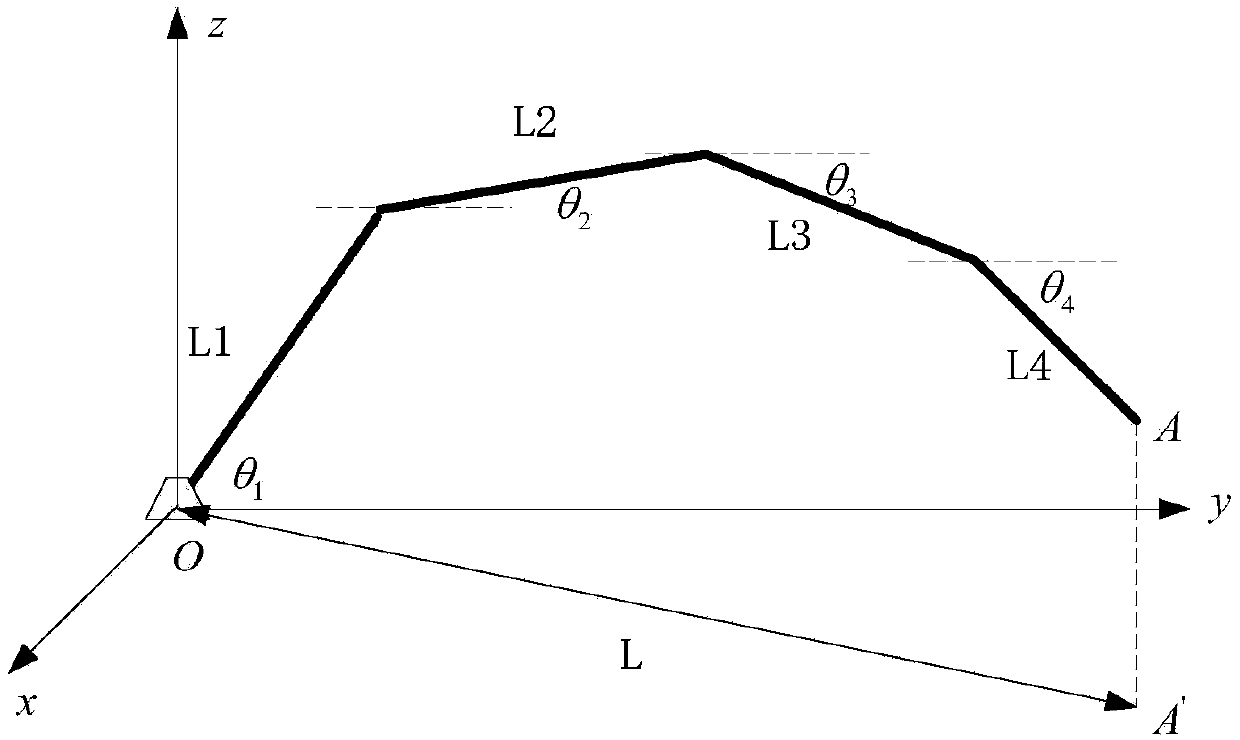
[0034] In the present invention, unless stated to the contrary, the used orientation words such as "up, down, top, bottom" generally refer to the directions shown in the drawings or refer to the vertical, perpendicular or gravitational directions The terms used to describe the mutual positional relationship of the various components mentioned above. In addition, in the three-dimensional coordinate system established in the present invention, the height direction of the boom is the z direction, the rotation plane of the boom is the xy plane, and the coordinate origin O is set as the hinge point between the boom and the turntable.
[0035] Such as figure 2 As s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More