Spray-coating robot with parallel structure
A spraying robot and spray gun technology, applied in spraying devices and other directions, can solve the problems of insufficient working space and flexibility, poor mechanical dynamic performance, heavy arm weight, etc. The effect of small motion inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below in conjunction with accompanying drawing, technical scheme of the present invention is described:
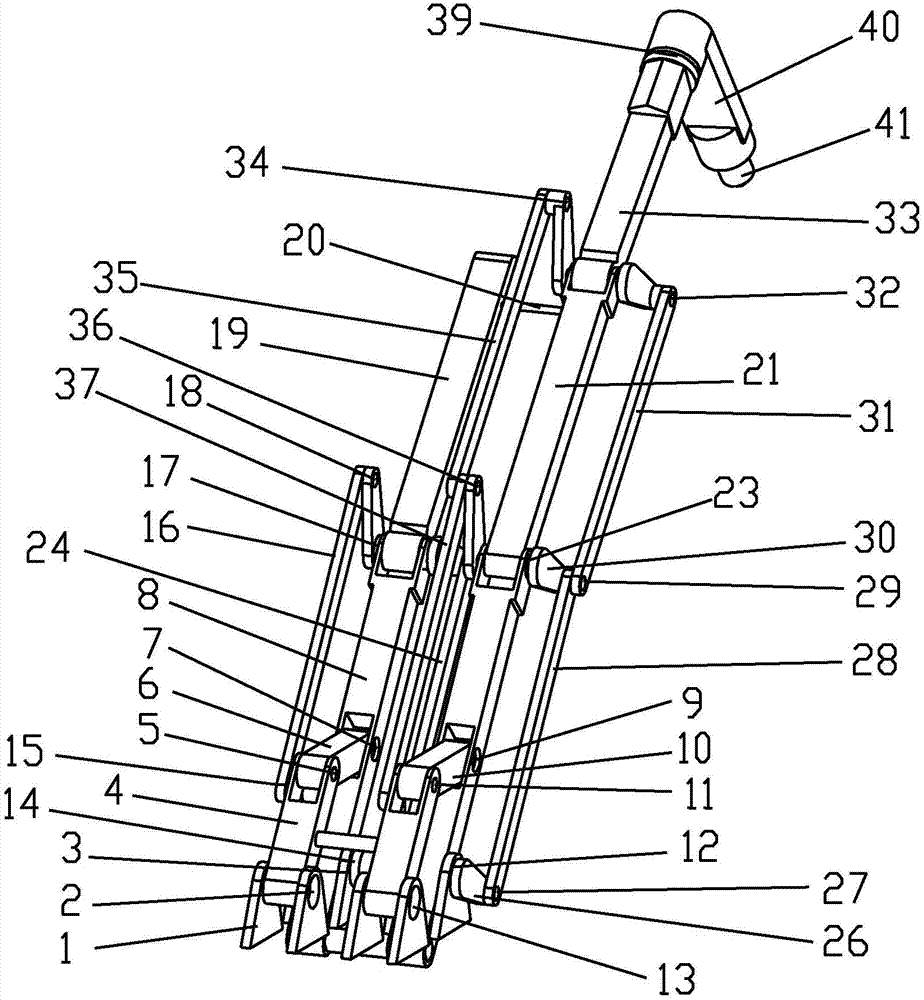
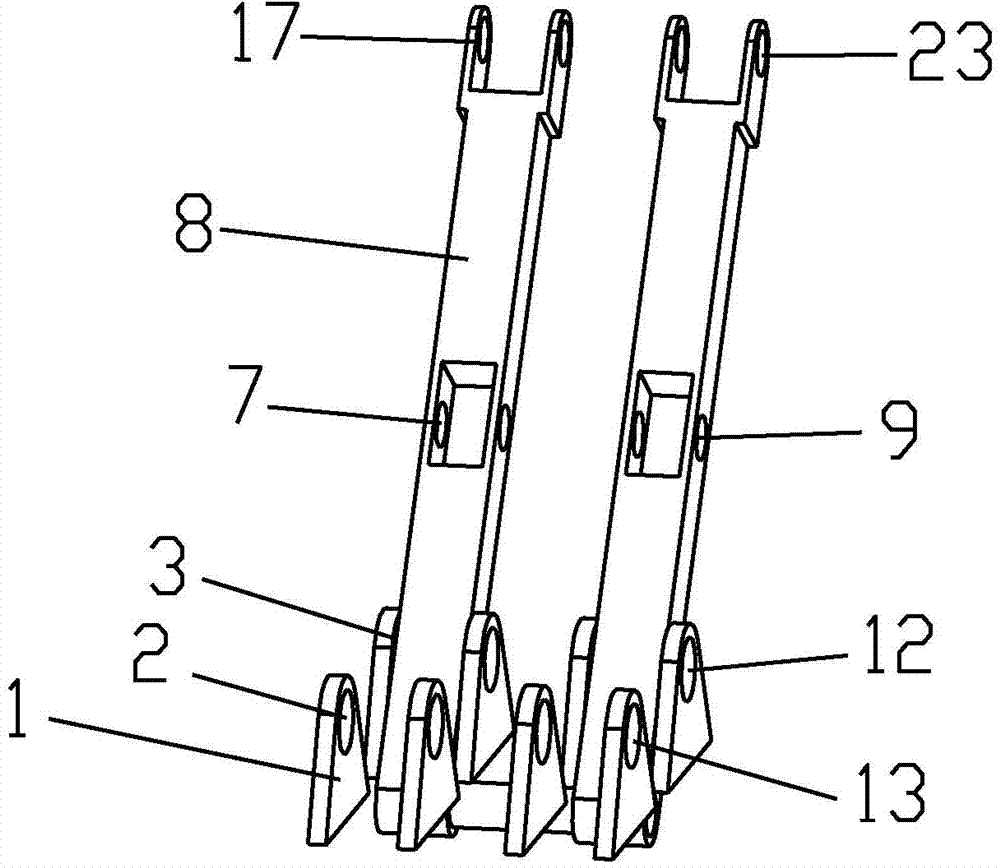
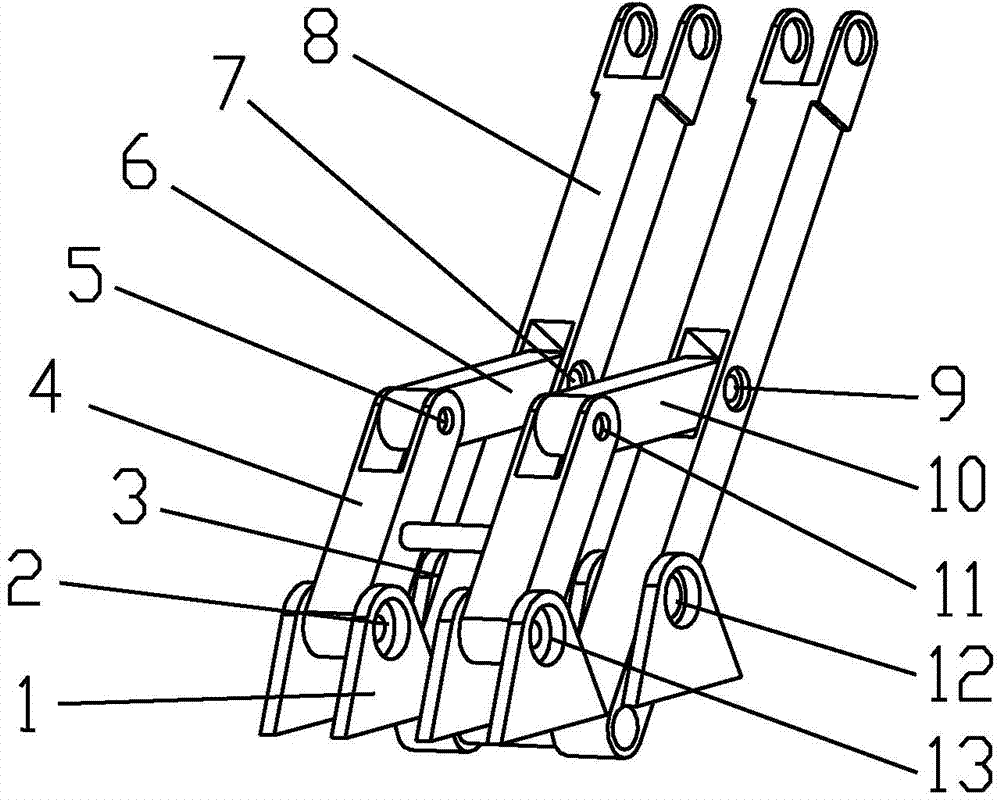
[0029] control Figure 1-Figure 13 , the side-by-side structure spraying robot includes: a waist lifting mechanism, a shoulder lifting mechanism, an elbow turning mechanism, a spray gun turning mechanism and a frame 1 . Realize any flexible movement of the entire robot working space.
[0030] control figure 1 , figure 2 , image 3 , Figure 7 and Figure 8 , the waist elevating mechanism is made up of double active rod 4, first connecting rod 6, second connecting rod 10 and waist rod 8. The double active rod 4 is connected on the frame 1 through the first rotating pair 2 and the second rotating pair 13, one end of the double active rod 4 is connected with the first connecting rod 6 through the third rotating pair 5, and the first connecting rod 6 is connected through the fourth The rotating pair 7 is connected with the waist rod 8, the other end of the doubl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com