

Contour Control Method of Servo System Based on Task Polar Coordinate System
A polar coordinate system, contour control technology, applied in the direction of digital control, electrical program control, etc., can solve problems such as large contour error, and achieve the effect of reducing contour error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
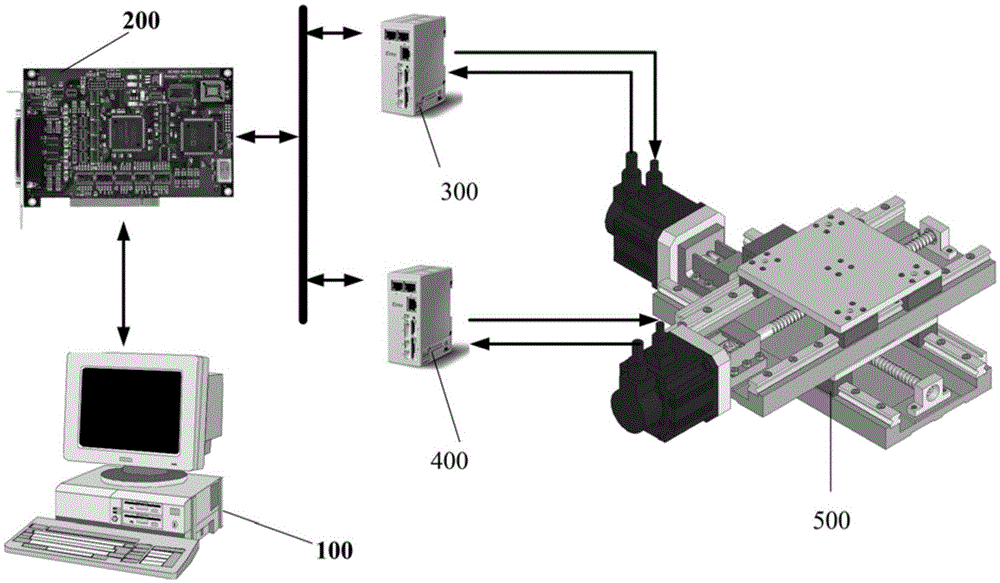
[0030] A method for controlling the contour of a servo system based on a task polar coordinate system, comprising the following steps:
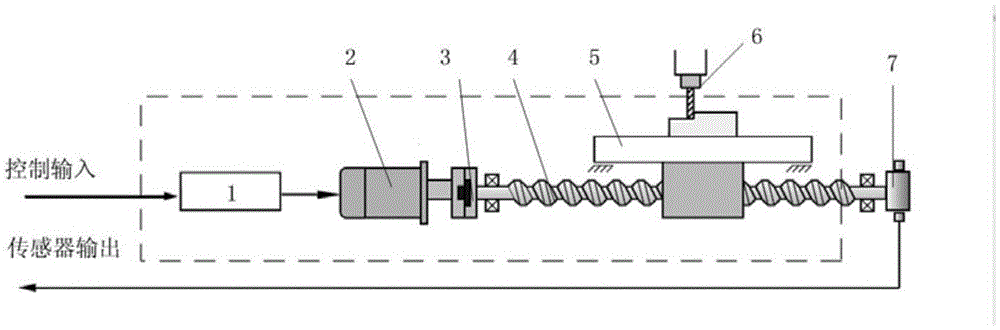
[0031] S1, establishing the dynamic equation of the XY motion platform;
[0032] S2. According to the expected trajectory information, establish the task polar coordinate system based on the close circle approximation, and calculate the corresponding coordinate transformation relationship;
[0033] S3, transforming the system dynamics equation under the Cartesian coordinate system into the error dynamics equation under the task polar coordinates;
[0034] S4. Design a feedback PD controller based on feedforward compensation to realize decoupling control of error dynamics.
[0035] Step S1 "Establishing the Kinetic Equation" is specifically implemented as follows:
[0036] Such as Figure 1 to Figure 7 As s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More