

Multi-cavity crab-type negative-pressure wall-climbing robot
A wall-climbing robot and robot technology, applied in the field of wall-climbing robots, can solve the problems of poor movement continuity, limit the application environment of wall-climbing robots, low work efficiency, etc., achieve stable walking driving force, improve reliability and adaptability, and stabilize good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
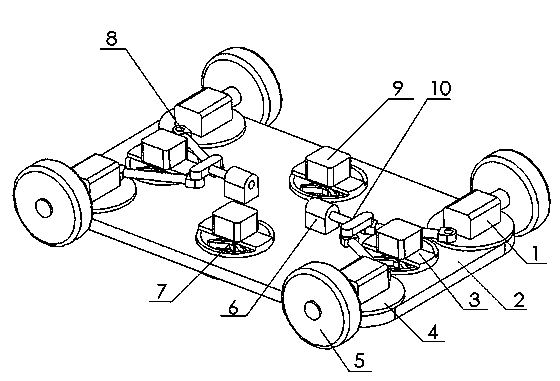
[0020] As shown in the figure, the present invention includes a power system, an adsorption system, and a control system. The power system includes wheels 5, driving motor 1, turntable 4, linear motor 6, push rod 10, connecting rod 8; The control system includes a receiving system and a remote controller.
[0021] The drive motor 1 is fixed on the turntable 4, the output shaft of the motor 1 is connected to the wheel 5, the turntable 4 and the base 2 are fixed by bearings, and the turntable 4 can rotate within 90°; the linear motor 6 is fixed on the base 2, and the linear motor push rod 10 and the turntable 4 are connected by connecting rod 8 to form a crank slider reverse mechanism, which can drive the push rod 10 to move through the reciprocating motion of the linear motor 6, and then drive the turntable 4 to rotate to complete the steering.
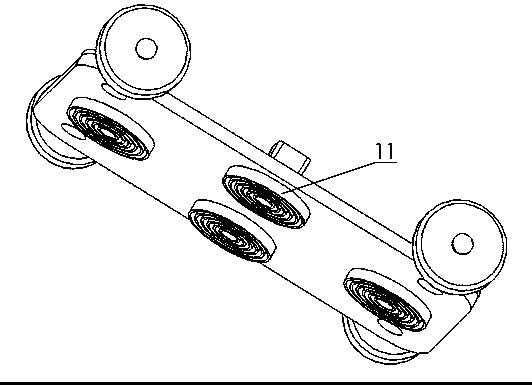
[0022] The four cavities are fixed on the base 2, and the part in contact with the wall is a labyrinth flexible 11 structure. The ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More