

A method and device for line-finding and navigation of an intelligent robot
A technology of intelligent robots and navigation devices, applied in navigation, measuring devices, surveying and navigation, etc., can solve the problems of high cost, poor expansion in the later period, difficulty in transformation and maintenance, etc., and achieve low cost, effective method, easy maintenance and expansion Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention is explained below in conjunction with embodiment and accompanying drawing.
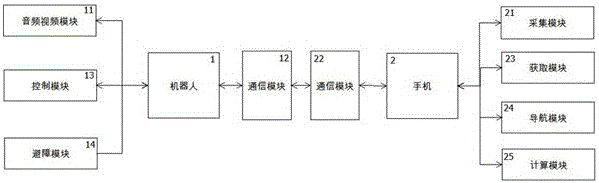
[0034] The present invention is made up of: the navigation device that CPU module, collection module, acquisition module, navigation module, communication module and calculation module are formed and the robot device that is formed with control module, communication module, audio frequency module and video module, wherein in the navigation device:
[0035] The acquisition module is composed of GPS positioning module, magnetometer and acceleration sensor module and CPU module, which is used to obtain the status information of the current robot, including the polar azimuth, longitude and latitude of the current robot;
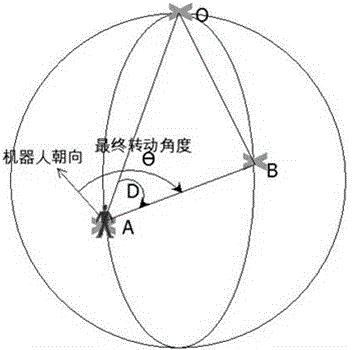
[0036] The acquisition module uses a wireless module. The mobile phone uses 3G communication to obtain the whole map. The mobile phone and the robot use wifi communication. Through the CPU module, it is used to combine the robot's current position and destina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More