

Pendulum type three-propeller underwater spherical robot
A spherical robot and thruster technology, which is applied in the direction of propulsion device engines, ship propulsion, propulsion components, etc., can solve the problems of restricting underwater robots, large turning radius, complex structure, etc., and achieve simple structure, improved flow resistance, and direction Adjustable and flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
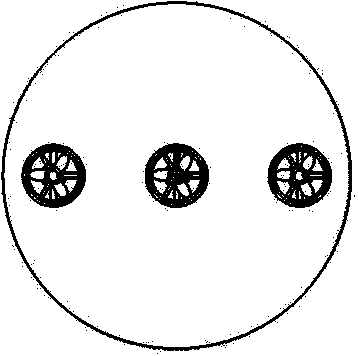
[0021] Such as figure 1 As shown, a three-propeller underwater spherical robot has a spherical shell and three propellers on the left, middle and right. When the robot walks in a straight line, the three propellers can be controlled to run with the same propulsion force, thereby The robot can move linearly along the predetermined direction. If the robot needs to turn, the thrust of the right thruster 1 and the left thruster 3 can be controlled so that there is a thrust difference between the left and right thrusters, and a steering moment will be generated for the robot, thereby turning the robot.
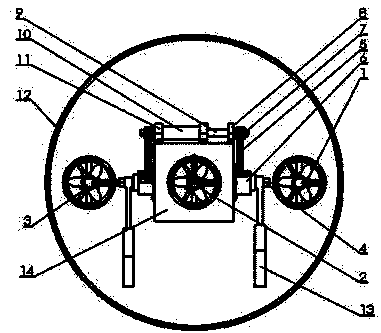
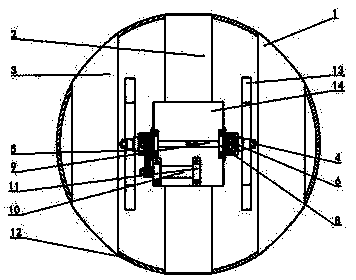
[0022] Such as figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 As shown, the robot controls the steering through the right thruster 1 and the left thruster 3, and controls the pitching attitude of the robot through the swing of the heavy pendulum 16. When the swing of the heavy pendulum 16 is controlled, the heavy pendulum 16 will give the robot a reaction force, there...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More