

Outdoor automatic walking device based on family courtyard and system and method for controlling outdoor automatic walking device based on family courtyard
An automatic walking and garden technology, applied in two-dimensional position/channel control and other directions, can solve the problems of large accumulation error, high electromagnetic cost, and inability to effectively control the movement of outdoor mobile robots, and achieve the effect of reliable solution and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
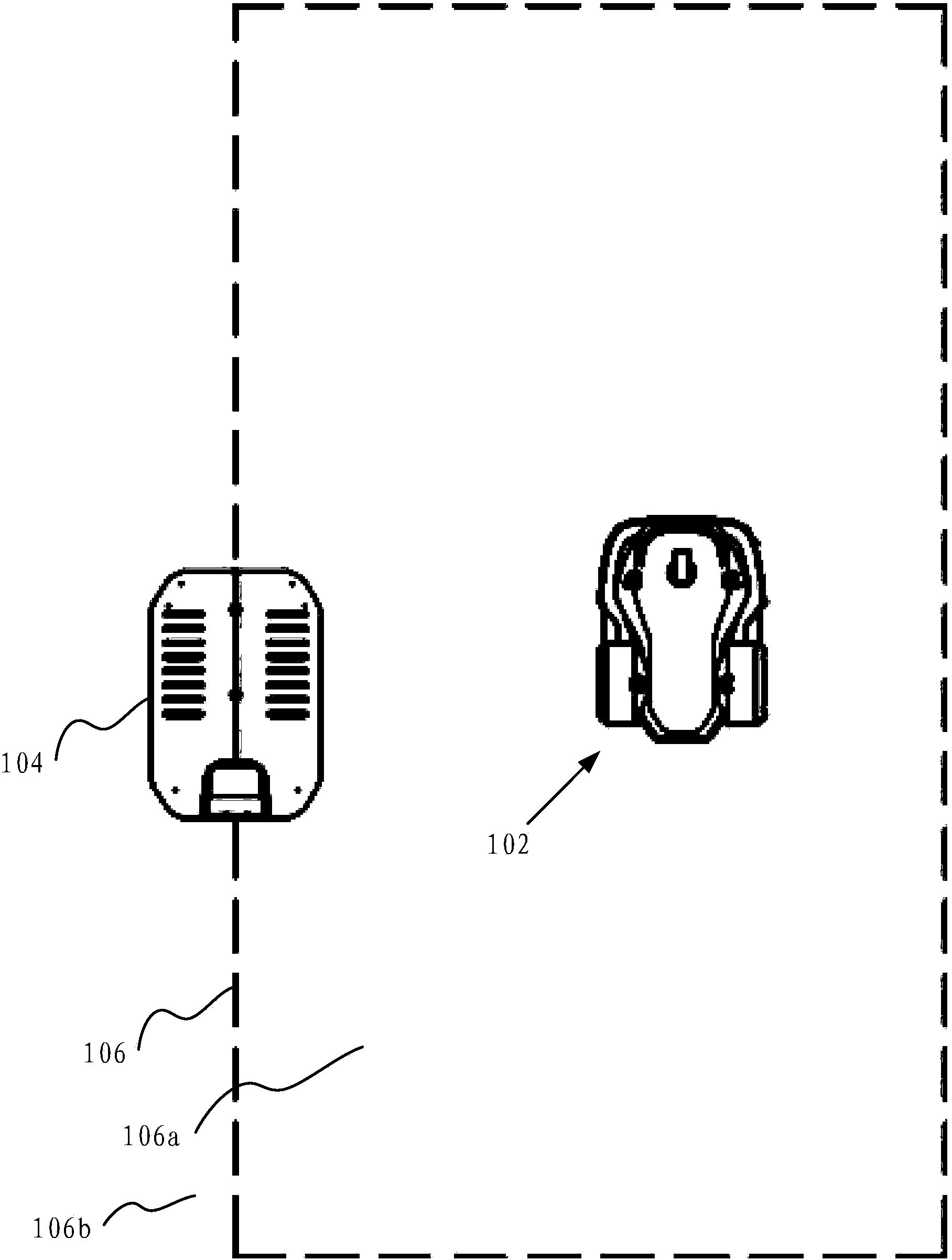
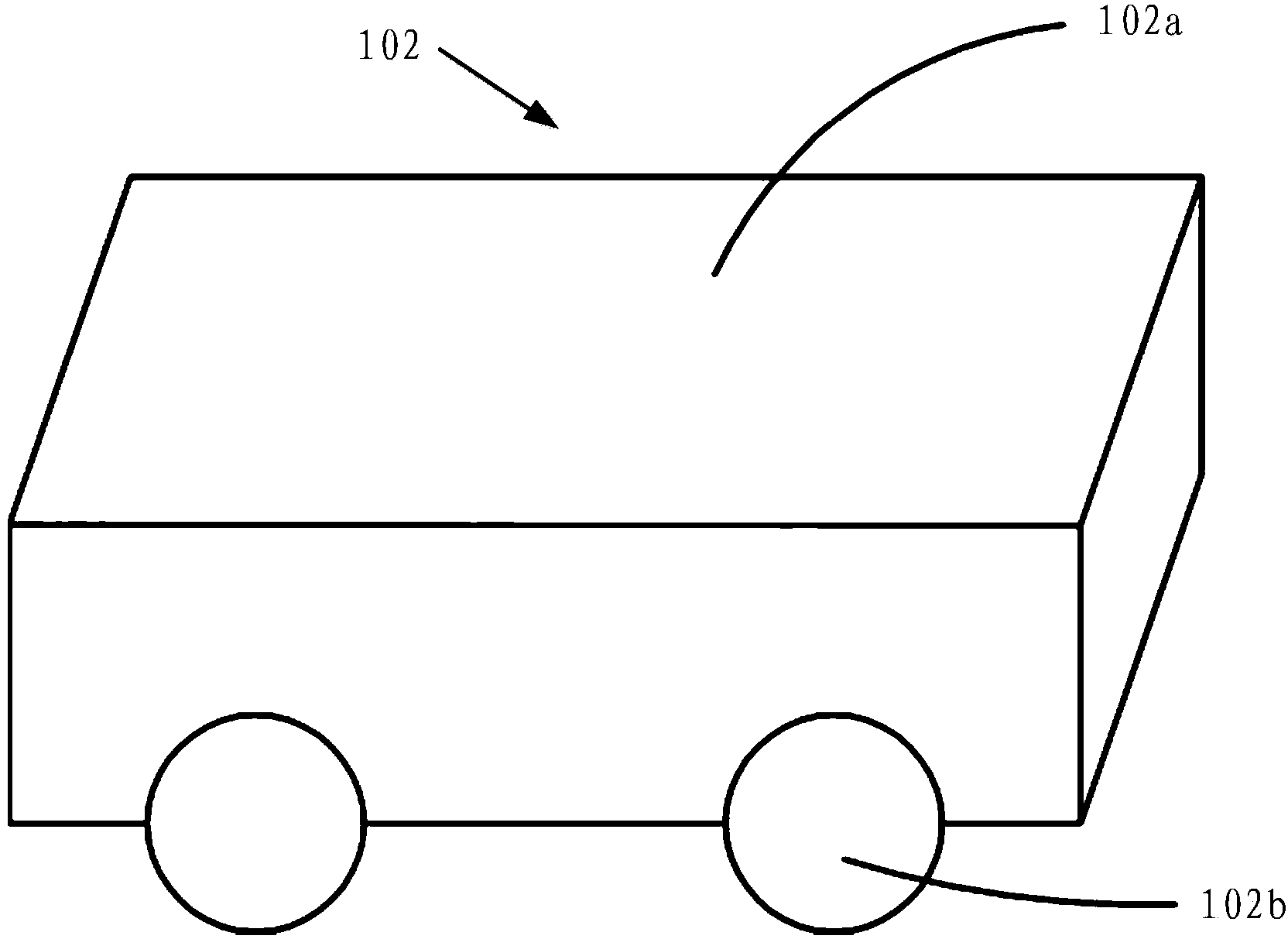
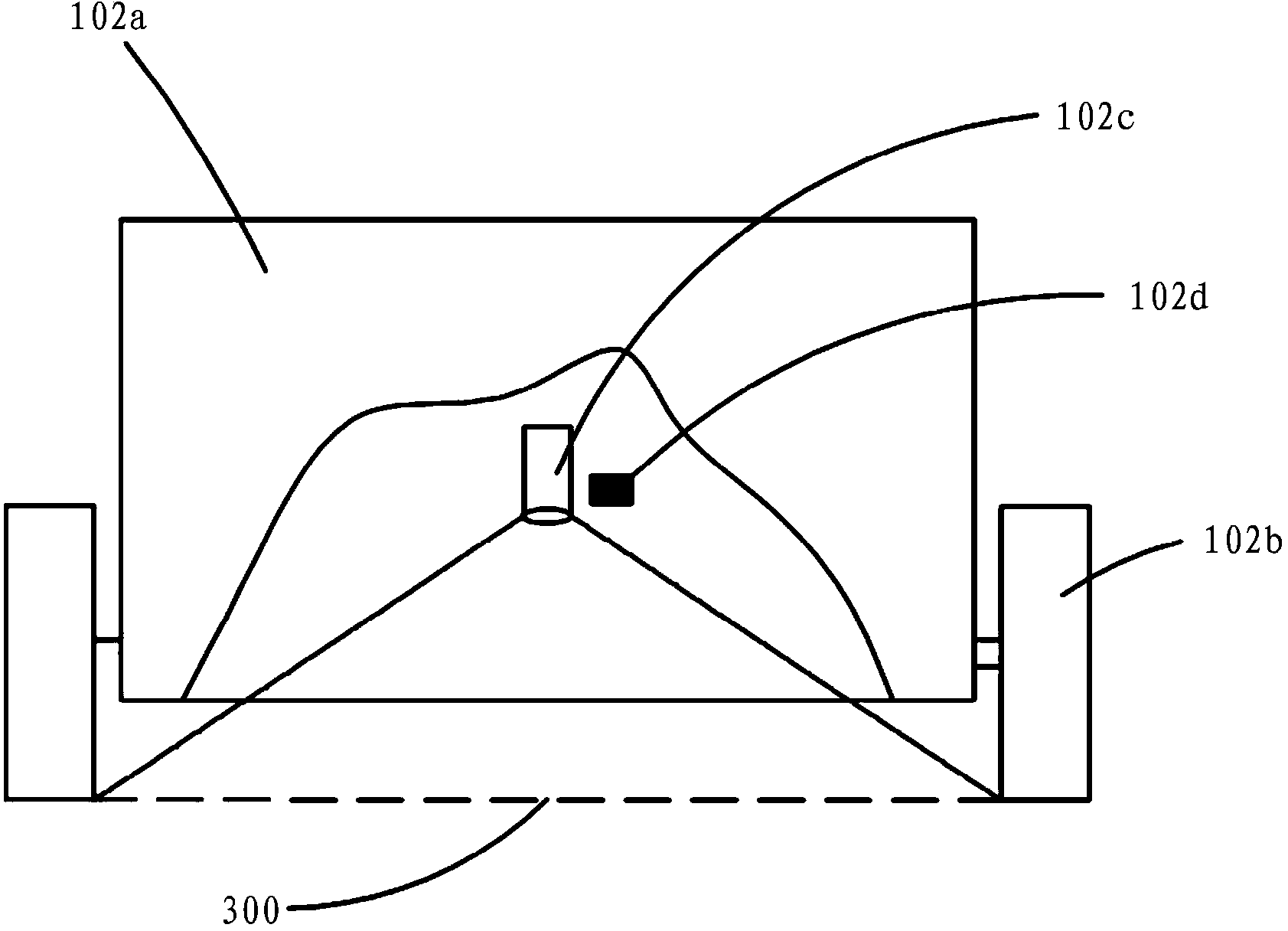
[0047] Such as figure 1As shown, in one embodiment, a family garden-based outdoor automatic running device control system is provided, including an automatic running device 102 and a docking device 104 for the automatic running device 102 to stop and replenish energy for the automatic running device 102 . The surface on which the self-propelled device 102 walks is its working surface. In this embodiment, the working surface may include a working area 106a and a non-working area 106b, the boundary line between the working area 106a and the non-working area 106b forms a preset boundary 106, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More