Sonar detection device and method for docking between underwater robot and underwater working platform
A technology for underwater robots and working platforms, which is applied in the direction of measuring devices, instruments, and the use of re-radiation, etc., can solve the problems of short wavelength of electromagnetic waves, inability to complete docking work, and inability to realize long-distance transmission, etc., and achieve the effect of improving docking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
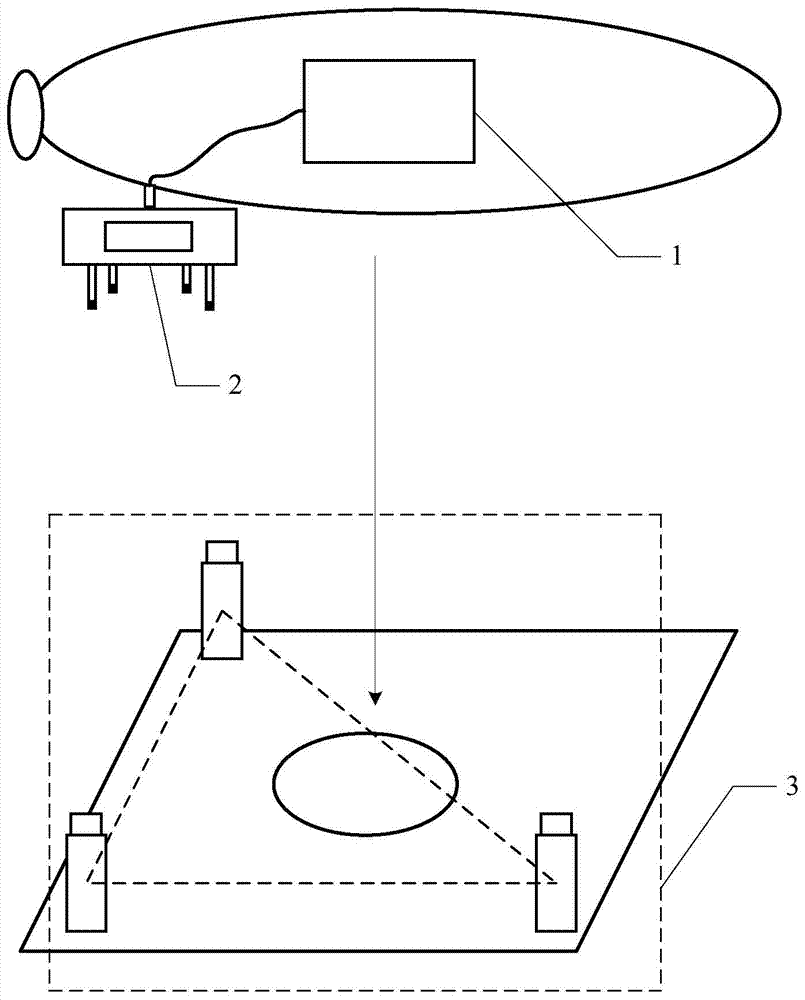
[0038] Example 1: Combining figure 1 Illustrate this embodiment, the sonar detection device used for the docking of the underwater robot and the underwater work platform described in this embodiment includes a guidance system 3, a receiving system 2 and a control system 1, and the guidance system 3 is installed in the underwater working platform. Around the docking group port of the platform, the receiving system 2 is installed at the bottom of the tail of the underwater robot to receive the guidance signal sent by the guidance system 3. The control system 1 is installed in the dry cabin of the underwater robot, and the receiving system 2 passes the cable Connect with control system 1.
Embodiment 2
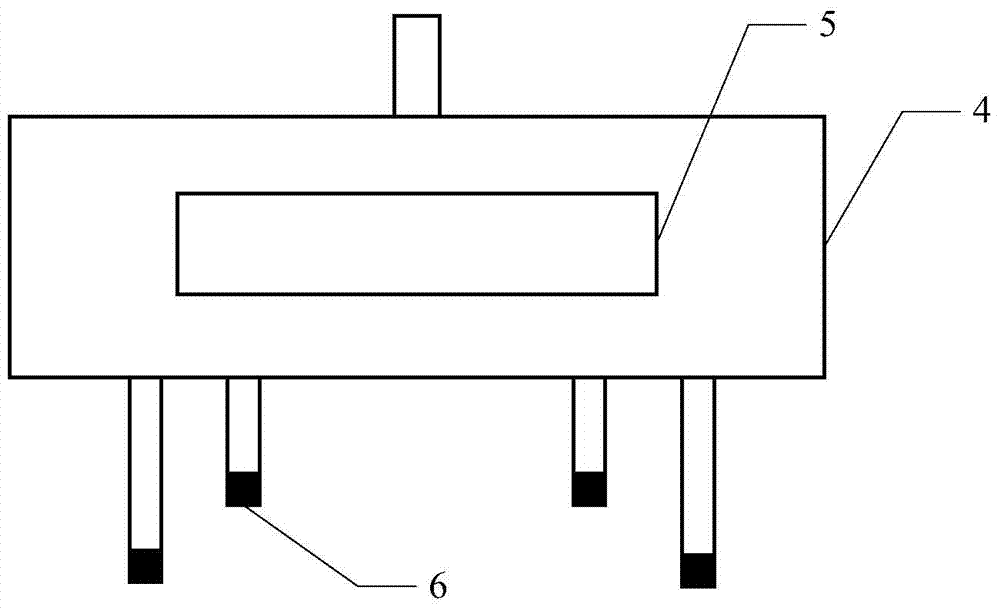
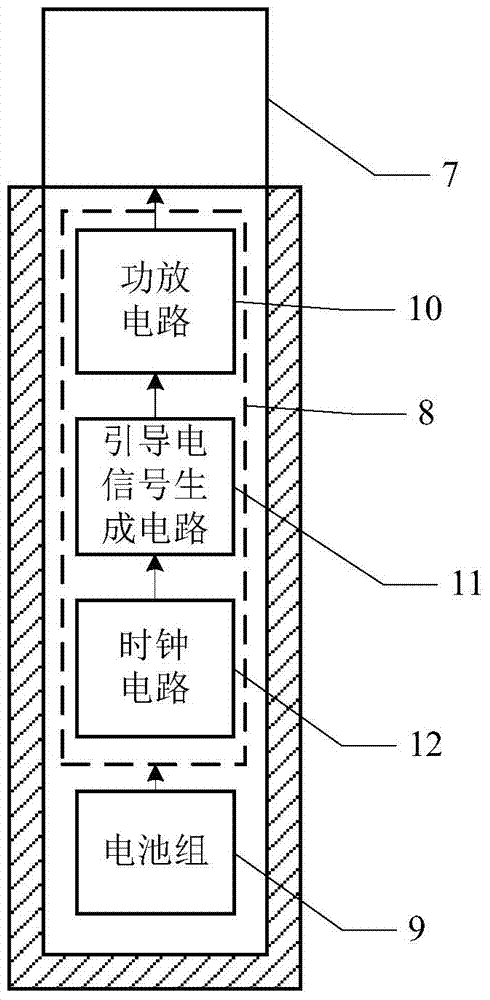
[0039] Embodiment 2: Combination image 3 Describe this embodiment, the difference between this embodiment and the sonar detection device for docking the underwater robot and the underwater working platform described in Embodiment 1 is that the guidance system 3 includes 3 guidance signal emission systems, and the guidance signal The transmitting system includes a transmitting transducer 7, a guiding signal generating system 8, a battery pack 9 and a housing, the guiding signal generating system 8 and the battery pack 9 are sealed inside the housing, and the battery pack 9 is used to provide the power of the guiding signal generating system 8. Working power supply, the transmitting transducer 7 is fixed on the upper surface of the shell, and the transmitting transducer 7 is used to launch a guiding sound signal into the water, and the guiding signal generation system 8 includes a power amplifier circuit 10, a guiding electrical signal generating circuit 11 and a clock circuit 1...
Embodiment 3
[0040] Embodiment 3: The difference between this embodiment and the sonar detection device for the docking of the underwater robot and the underwater working platform described in Embodiment 2 is that the three guiding signal emission systems are fixed according to the formation of an isosceles right triangle Around the docking port of the underwater working platform.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More