

Ultra-deep mine hoist multi-rope cooperative control system and method
A mine hoist and control system technology, which is applied to lifting equipment, elevators, transportation and packaging in mines, etc., can solve problems such as reduced work efficiency, reduced safety, ultra-deep shaft hoisting, and increased difference in wire rope tension, so as to improve work efficiency. Efficiency and reliability, avoidance of wire rope slack, avoidance of vessel tilting effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0021] Embodiment 1: The multi-rope cooperative control of the ultra-deep mine hoist includes a control system and a control method;
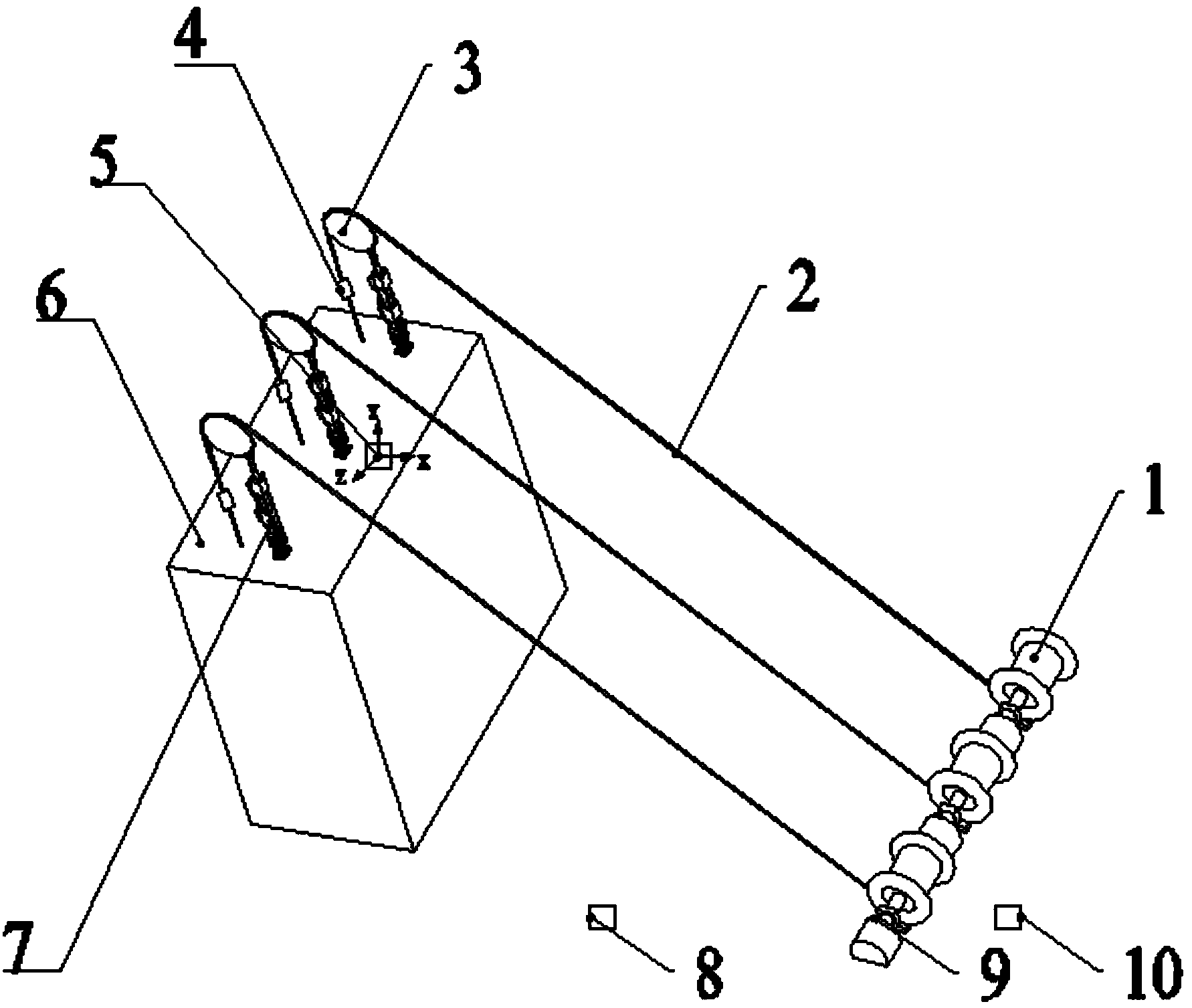
[0022] The control system includes multiple sets of lifting control systems with the same structure; one set of lifting control systems includes: hoist drum 1, steel wire rope 2, sky wheel 3, tension pressure sensor 4, posture angle sensor 5, container 6, servo hydraulic pressure Cylinder 7, servo hydraulic cylinder control system 8, frequency conversion motor 9, frequency conversion motor controller 10, proportional servo valve 11, accumulator 12, overflow valve 13, check valve 14, stop valve 15, pump 16 and motor 17;
[0023] The output shaft of the variable frequency motor 9 is connected to the hoist drum 1, and the variable frequency motor controller 10 is connected to the variable frequency motor 9; the steel wire rope 2 is connected between the hoist drum 1 and the container 6, between the hoist drum 1 and the container 6 There is a servo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More