

Parametric Design Method of Anti-disturbance Composite Nonlinear Servo Controller
A servo controller, parametric design technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve ADRC closed-loop stability analysis that has not been solved, the relationship between system performance is unclear, and engineering applications are troublesome, etc. problem, to achieve the effect of fast and accurate fixed-point tracking, smooth and accurate servo tracking, good transient performance and steady-state performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0038] The present invention is a parametric design method of an anti-disturbance compound nonlinear servo controller, which is suitable for the second-order servo system described by the following model:
[0039]
[0040] in ;
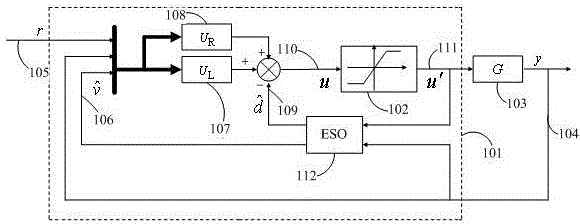
[0041] x is the system state vector, represents the first derivative of x with respect to time, are the internal state variables of the system, For the control input signal, is a controlled and measurable system output, is a constant or slowly varying input disturbance, and is a scalar constant, and sat( ) is a saturation limiting function, including the following steps,
[0042] Step (1): Design compound nonlinear control law, including linear feedback control law and nonlinear feedback control law;
[0043] Step (2): Design a reduced-order extended state observer while estimating the unmeasu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More