

Robot continuous point position motion planning method and motion controller thereof
A point-based motion and robot technology, applied in two-dimensional position/channel control and other directions, can solve the problems of discontinuous speed, insignificant effect, and inaccurate arrival of the intermediate point, so as to achieve smooth motion process and ensure motion trajectory. shape effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
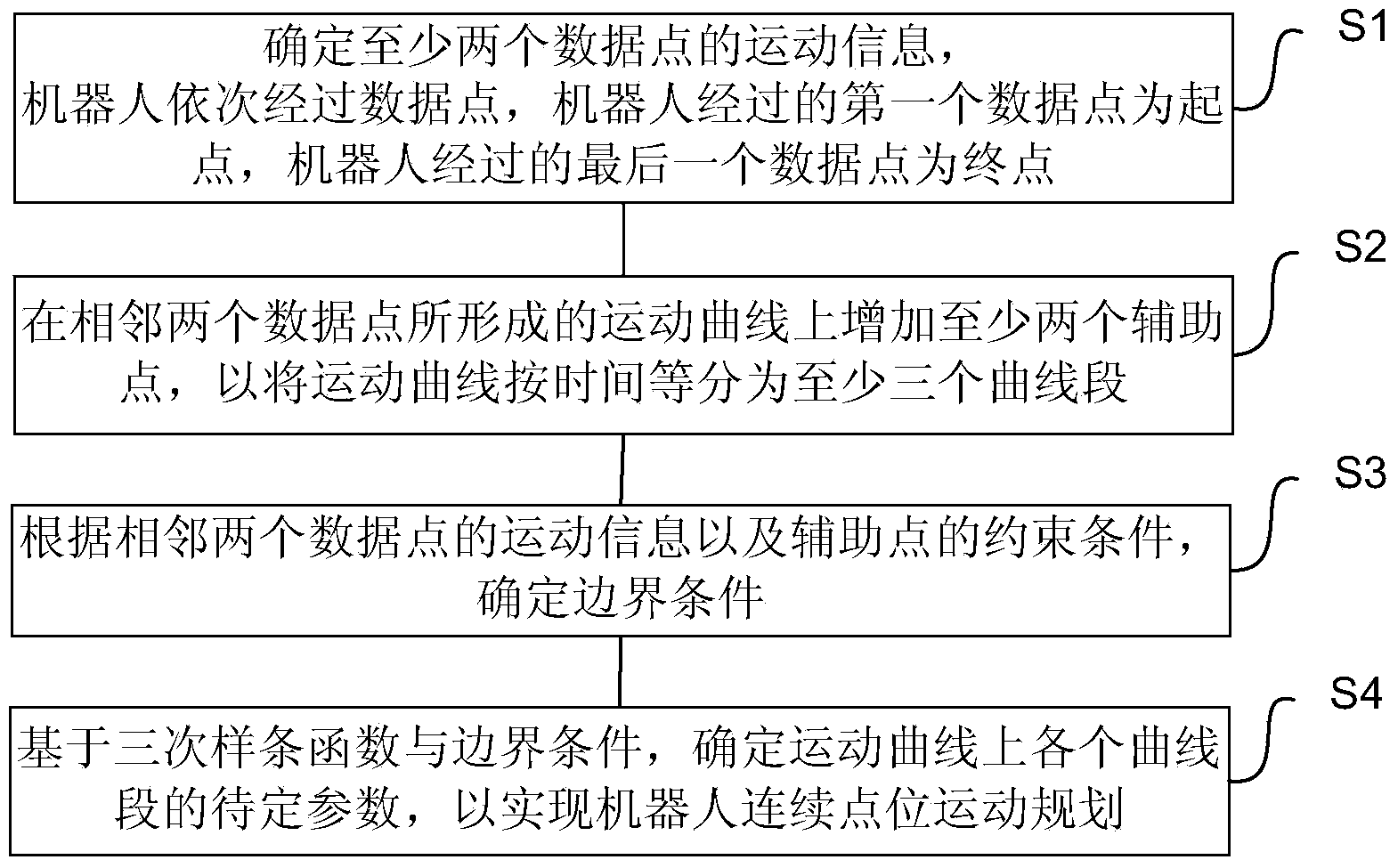
[0060] figure 2 It is a schematic flow chart of the robot continuous point motion planning method in one embodiment of the present invention, such as figure 2 As shown, the robot continuous point motion planning method includes the following steps:
[0061] Step S1: Determine the motion information of at least two data points, the robot passes through the data points in turn, the first data point passed by the robot is the starting point, and the last data point passed by the robot is the end point;
[0062] Step S2: Add at least two auxiliary points on the motion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More