

All-flexible capacitive tactile sensor
A tactile sensor and capacitive technology, applied in the field of sensing, can solve problems such as difficult array formation, poor anti-interference, non-adjustable range and sensitivity, etc., and achieve the effect of simplifying anti-shielding measures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
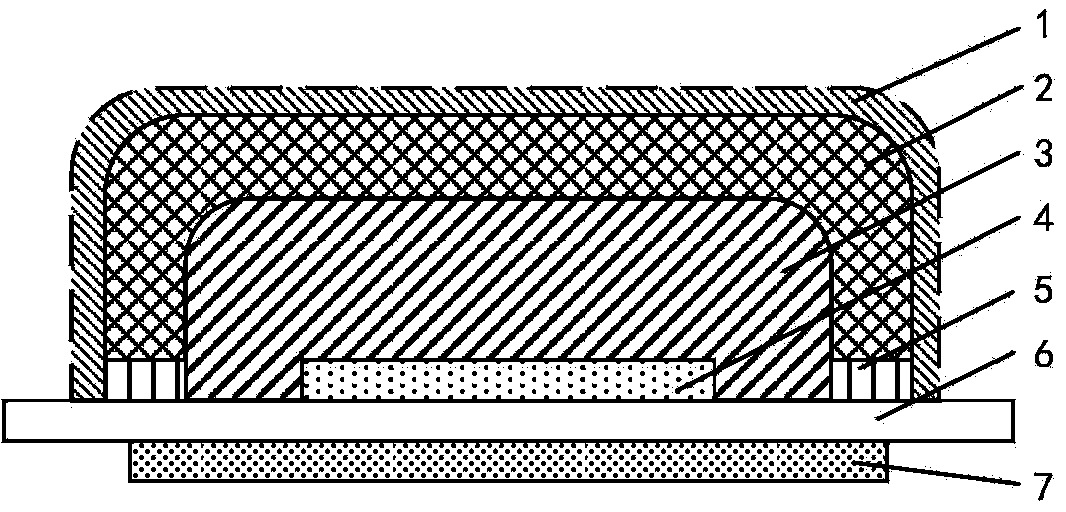
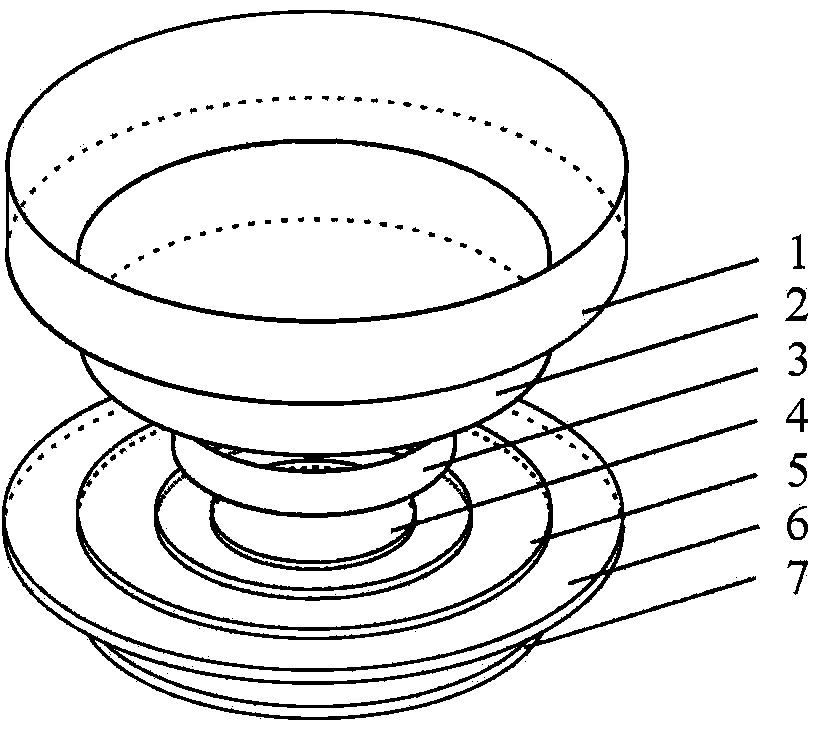
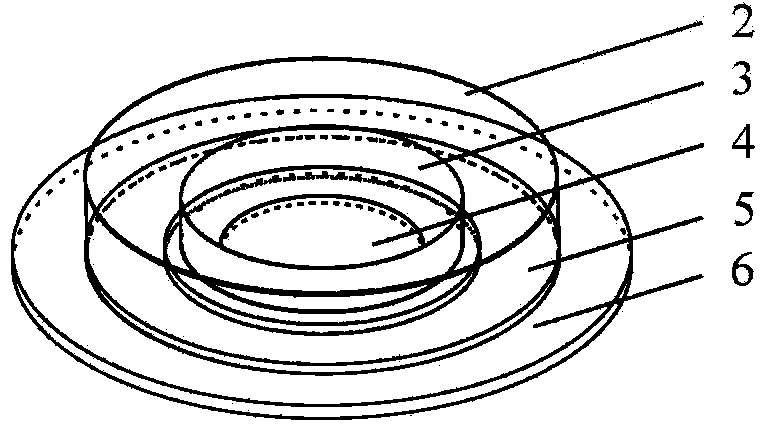
[0036] Such as figure 1 As shown, the structure of the fully flexible capacitive touch sensor in this embodiment is as follows: a flexible substrate 6 is provided, a shielding layer 7 is provided on its lower surface, a flexible conductive lower plate 4 is provided on its upper surface and the flexible conductive lower plate 4 is arranged around the flexible conductive substrate at intervals. A flexible conductive upper plate electrode 5 on the periphery of the lower plate 4;
[0037] Between the flexible conductive lower pole plate 4 and the flexible conductive upper pole plate electrode 5, an inverted concave elastic dielectric layer 3 is covered, and the bottom surface of the groove of the elastic dielectric layer 3 is attached to the upper surface of the flexible conductive lower pole plate 4. The boss of the dielectric layer 3 is embedded between the flexible conductive lower plate 4 and the flexible conductive upper plate electrode 5;
[0038] The elastic dielectric lay...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More