

Longitudinal track motion estimation and compensation method based on motion platform
A motion platform and compensation method technology, applied in the field of control law design, can solve problems such as landing accuracy, adverse effects on safety, bumping into the tail of the motion platform, impact, etc., and achieve the effect of improving landing accuracy and strong implementability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] A longitudinal runway motion estimation and compensation method for fully automatic landing,
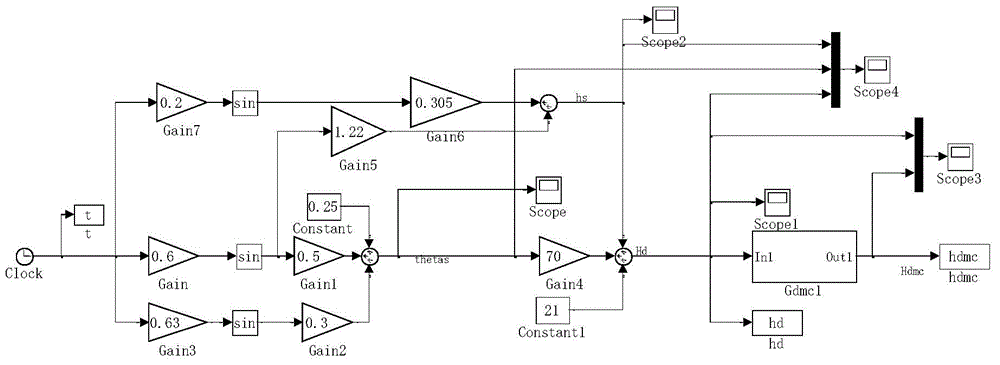
[0035] 1) First, the runway motion model and the required runway parameters are given
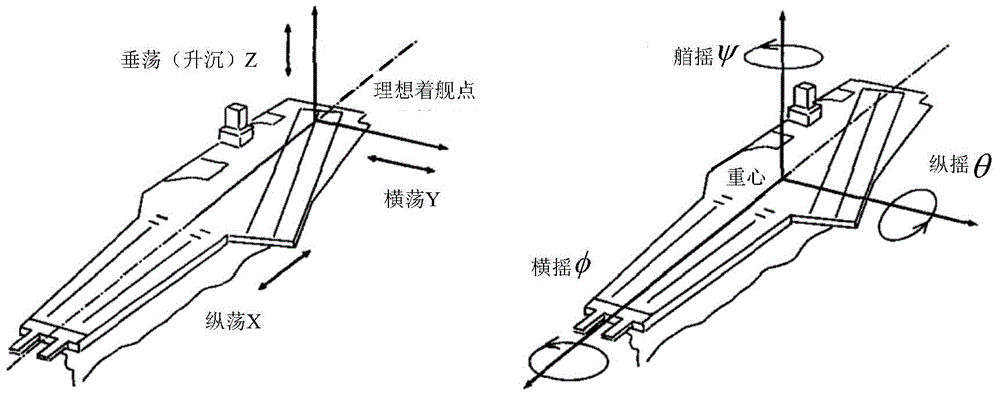
[0036] Pitch angle (°) dynamic model of pitch motion:
[0037]
[0038] Vertical undulation motion (m) dynamic model:
[0039]
[0040] in, is the initial phase of the function, here we can set
[0041] The distance X from the center line of the pitching motion of the given runway to the desired landing point F =70m, runway above sea level distance H 0 =21m.
[0042] Then the height change of the ideal landing point caused by the runway movement can be obtained as:
[0043] h D =H 0 +Y s +X F θ s =36.22sin(0.6t)+0.305sin(0.2t)+21sin(0.63t)+38.5
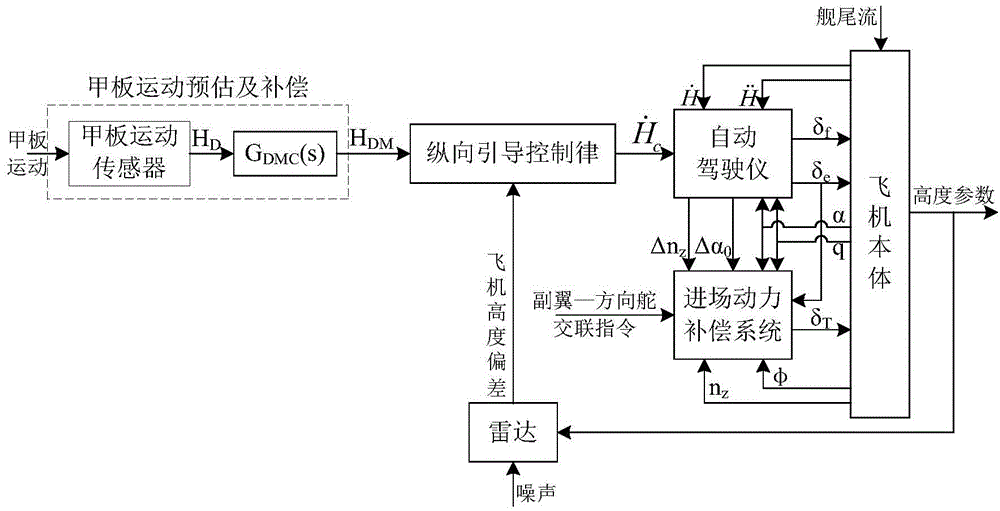
[0044] 2) Runway Motion Compensator
[0045] The general form of the runway motion compensator:
[0046] G DMC ( s ) = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More