

SINS (Ship's Inertial Navigation System)/CNS (Celestial Navigation System) deep integrated navigation system of mar rover, and realization method of system
A deep integrated navigation and integrated navigation technology, applied in the strapdown inertial navigation/astronomical navigation deep integrated navigation system and its implementation field, can solve the problems of inability to meet the navigation accuracy, navigation information divergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0131] The present invention will be further described in detail below in conjunction with the accompanying drawings.
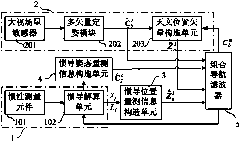
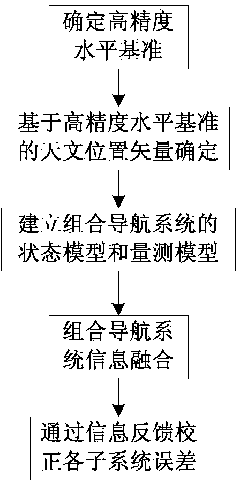
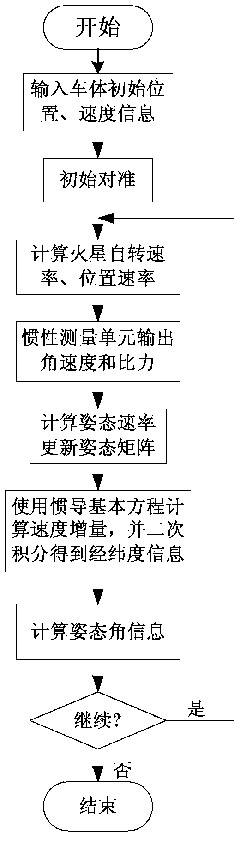
[0132] The invention relates to a SINS / CNS deep integrated navigation system of a Mars rover and a realization method thereof. By using the measurement information of the large field of view star sensor to assist the strapdown inertial navigation system to correct its attitude matrix, a high-precision mathematical level reference is obtained On this basis, using high-precision mathematical level benchmarks and inertial attitude information provided by celestial navigation Determine the astronomical position vector by Realize astronomical positioning. The inertial attitude attitude matrix obtained by the inertial navigation attitude measurement information construction unit and the inertial navigation position measurement information construction unit respectively and the inertial navigation position vector Finally, combined with the error model of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More