

Fast steering spherical robot
A spherical robot, fast technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve problems such as motion instability, achieve the effects of simplifying motion control, reducing weight, and increasing the specific gravity of the pendulum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
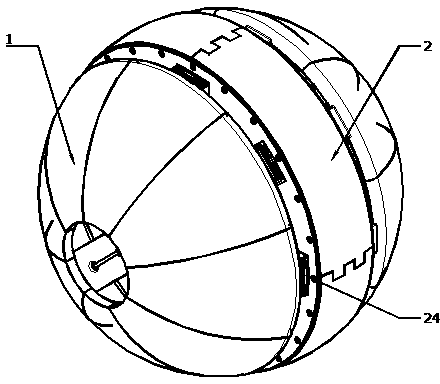
[0030] see Figure 1~Figure 4 , the fast steering spherical robot includes a total of 8 pairs of spherical ball feet (1) on both sides, 8 pairs of ball foot linkage mechanisms (4), two ball foot drive mechanisms (21), and a central spherical wheel frame (23) And a central pendulum mechanism (22) is characterized in that: the 8 pairs of spherical ball feet (1) are respectively connected to the two ball foot drive mechanisms (21) through 8 pairs of ball foot linkage mechanisms (4). The two football foot drive mechanisms (21) are respectively installed on the two side walls of the central spherical wheel frame (23); the central pendulum mechanism (22) is fixedly installed in the central spherical wheel frame (23) ; There is a brushless motor (13) in the central pendulum mechanism (22) to drive the central pendulum mechanism to change its center of gravity, and to control the robot to move forward and backward in the normal direction of the central axis; Each steering gear (8) dr...
Embodiment 2
[0032] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
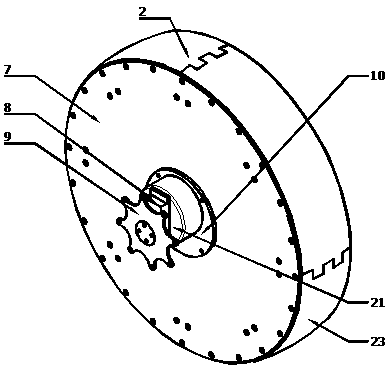
[0033] The central spherical wheel frame (23) is composed of a polylactic acid spherical wheel frame (2) with an elastic spherical wheel frame (2) fixedly connected to a carbon fiber circular plate (7) on both sides, and the spherical wheel frame (2) In order to divide into 4 parts to reduce the volume of 3D printing, the spherical wheel frame (2) is connected by studs, and the carbon fiber circular plate (7) is connected to the spherical wheel frame (2) by bolts.
[0034] The ball foot driving mechanism (21) includes a steering gear (8), a carbon fiber steering wheel (9) and a steering gear frame (10), and the steering gear passes through (8) through the steering gear frame (10) ) is fixedly installed on the carbon fiber circular plate (7) on the side of the central spherical frame (23), and the output shaft of the steering gear (8) is connected with a carbon fiber steerin...
Embodiment 3
[0039] see Figure 1~Figure 4 , This fast steering spherical robot includes 8 pairs of ball feet (1) deployment mechanisms on both sides and a pendulum drive structure in the center.
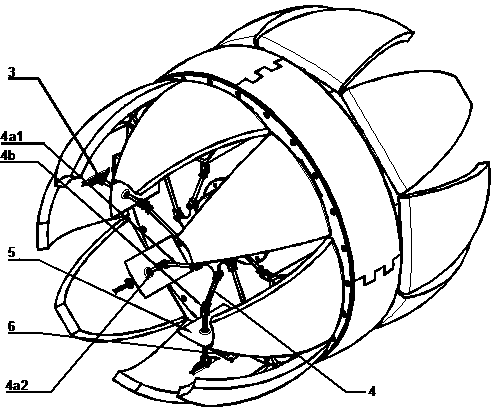
[0040] 1) The football foot (1) deployment mechanism: it is composed of the football foot (1) made of polylactic acid, two pairs of carbon fiber rods (4a) and three sets of spherical hinges. The slide slots on the football foot (3 ) is connected with the carbon fiber rods (4a1, 4a2), and the rigidity is strengthened by the fixing plate (5), and the ball foot (1) is connected with the carbon fiber circular plate (7) through the nylon hinge (6);
[0041] 2) The carbon fiber steering wheel (9) is connected with the carbon fiber rods (4a1, 4a2) through hinges (4b). ) are connected, and the rudder discs (9) of different structures determine the motion planning in different situations.
[0042] 3) The steering gear (8) is fixed on both sides of the carbon fiber circular plate (7) of the central modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More