

Two negative pressure adsorption type feet of wall-climbing robot
A wall-climbing robot and adsorption technology, applied in the field of robots, can solve the problems of limited walking distance, complex foot structure, poor obstacle crossing function, etc., and achieve the effect of large spanning distance, small overturning moment, and reduced torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] This embodiment is a negative pressure adsorption type biped of a wall-climbing robot.
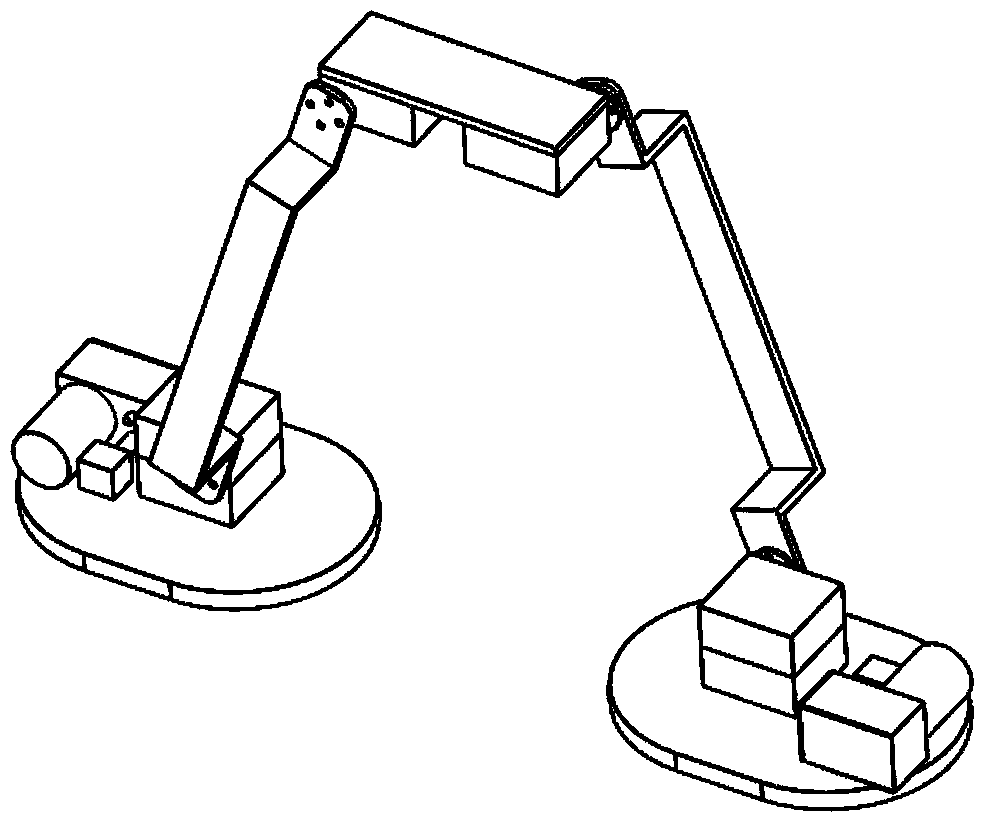
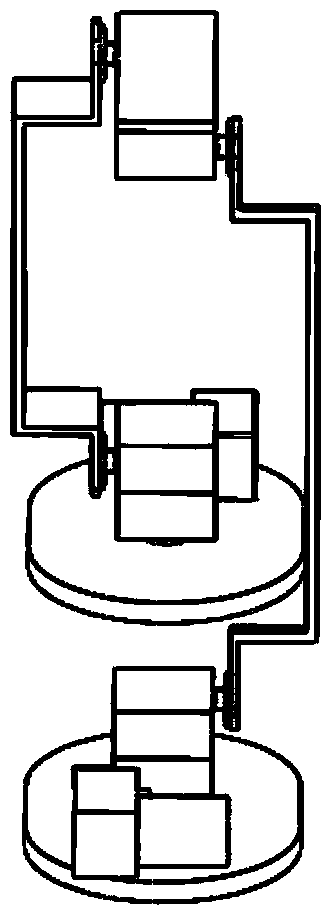
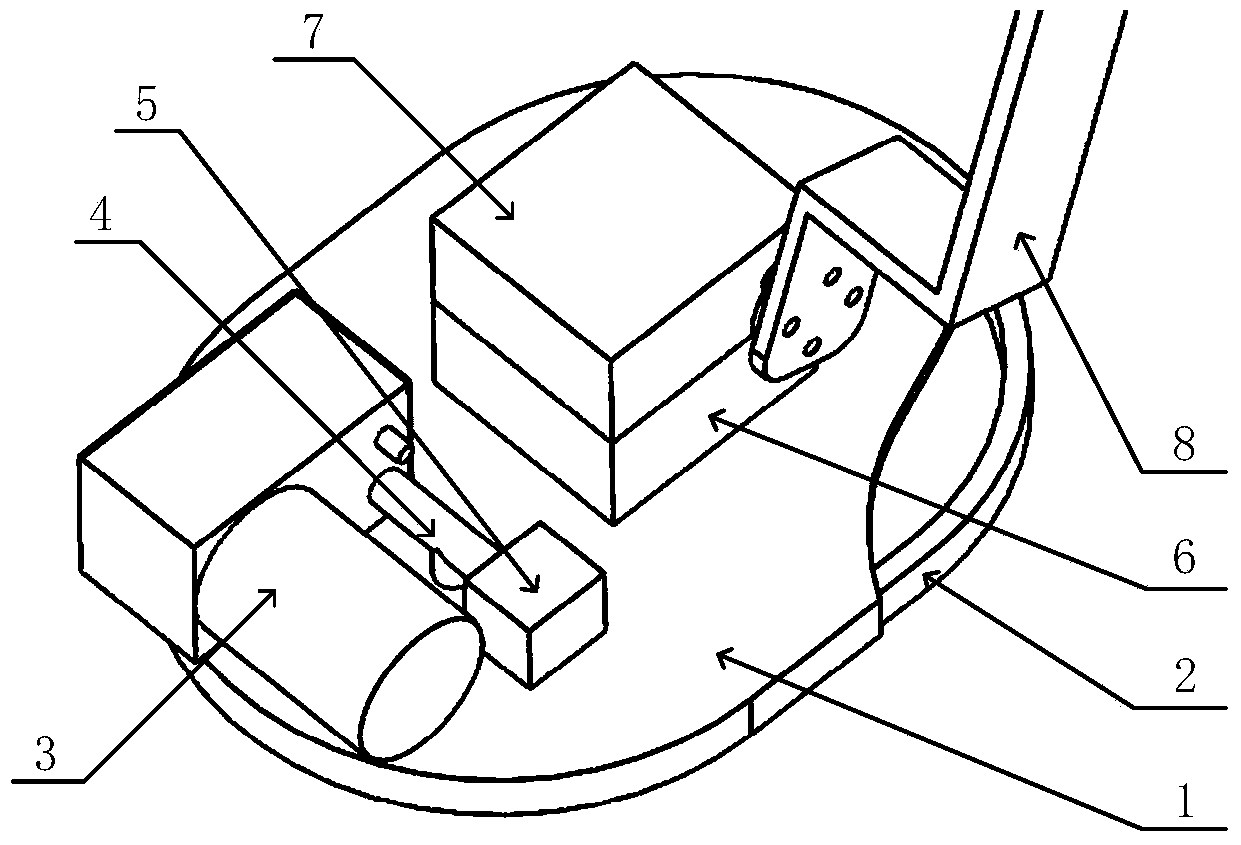
[0022] refer to Figure 1-Figure 4 , the negative pressure adsorption type feet of the wall-climbing robot in this embodiment consists of a cavity foot 1, a sealing gasket 2, a vacuum pump 3, a three-way joint 4, an air intake valve 5, a foot steering motor 6, an ankle joint motor 7, a thigh Rod 8, thigh joint motor 9, thigh connecting rod 10 form. The thigh joint motor 9 of the robot is fixed under the thigh connecting rod 10 through a motor base and screws. The two thigh joint motors 9 are installed on the same axis. 9 output shafts are connected, and the other ends of the two thigh rods 8 are respectively connected with the ankle joint motors 7 output shafts on the top of the two cavity feet 1 through connecting flanges and screws.
[0023] The cavity foot 1 of the robot is an elliptical concave shell structure, the sealing gasket 2 is inlaid inside the concave shell of the cav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More