

Norm constraint strong tracking cubature kalman filter method for satellite attitude estimation
A Kalman filter and satellite attitude technology, applied in the direction of integrated navigator, etc., can solve problems such as complex calculation, decreased filtering accuracy, and quaternion norm constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
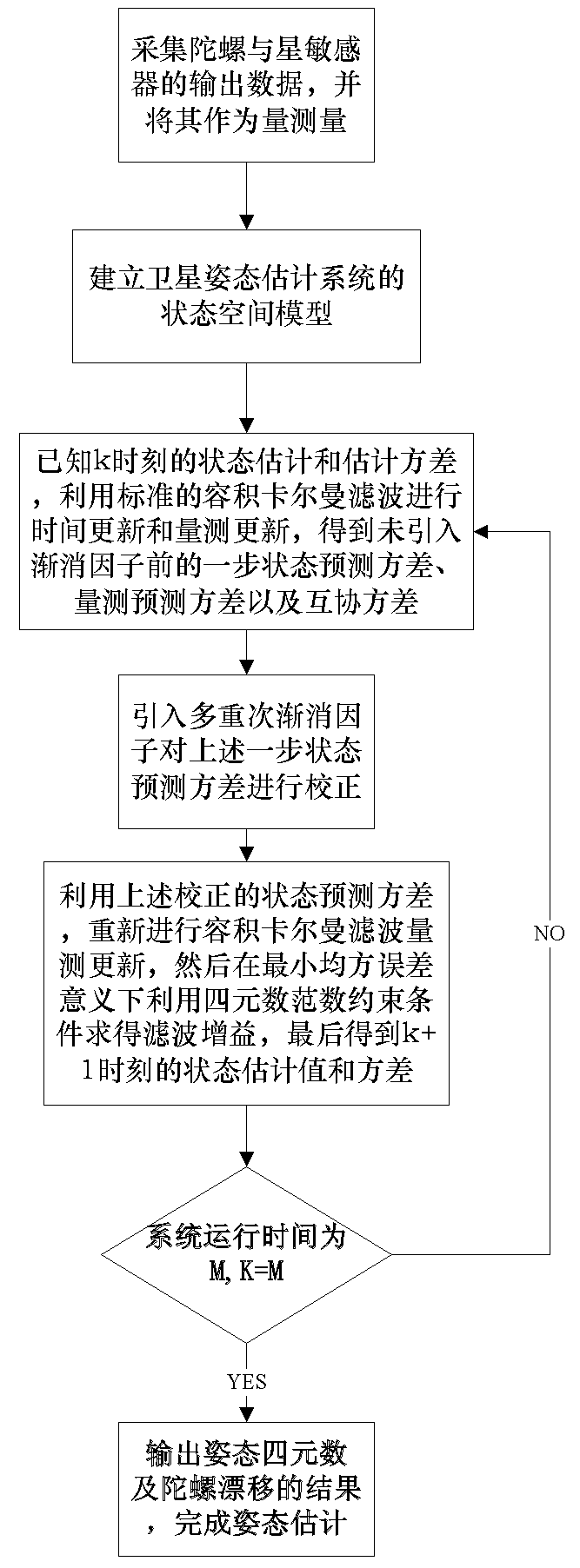
[0079] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0080] The present invention proposes a norm-constrained Strong Tracking Cubature Kalman Filter method (Norm-constrained Strong Tracking Cubature Kalman Filter, NSTCKF) for satellite attitude estimation. The present invention adopts volumetric numerical integration theory to approximate the mean value and variance of nonlinear function, and adjusts the forecast error covariance array by introducing two multi-order fading factors, so that different filtering channels have different adjustment capabilities, ensuring the forecast error covariance matrix. The symmetry of the variance matrix realizes the strong tracking of the filtering algorithm, and at the same time, according to the constraint condition of the quaternion norm, the optimal filtering gain in the sense of the minimum mean square error is designed.
[0081] The present invention is a norm-constrain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More