

Water flowing speed monitoring method based on moving target identification in videos
A moving target, speed monitoring technology, applied in the direction of fluid velocity measurement, velocity/acceleration/impact measurement, measurement device, etc., can solve the problems of low safety, high risk factor of ship measurement method and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
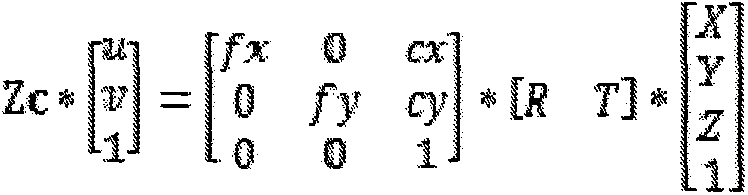
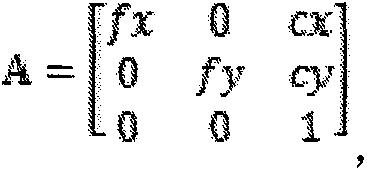
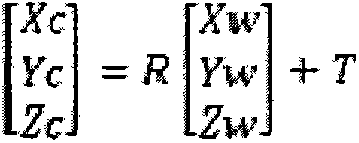
[0029] The present invention will be described in detail below in conjunction with the examples. This technology uses video monitoring technology to form a sequence of images in real time on the flow of the river section, automatically detects and tracks the buoys on the water surface in the sequence images, and uses the principles of solid geometry and photogrammetry to establish a conversion model between the image and the actual water surface coordinates to obtain the buoyancy The time and moving distance of objects moving in the field of view are calculated to obtain the flow velocity of the flood. Place suspended objects as buoys in the river, select the field of view of the camera, and place the camera fixedly for recording. The reality of the present invention mainly includes the following aspects: video-based moving target detection and tracking, camera calibration method and the parameters obtained through the previous steps to solve the water velocity.
[0030] 1. V...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More