

Self-adaption iterative learning control method for micro-gyroscope
An adaptive iterative, micro-gyroscope technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as inconvenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
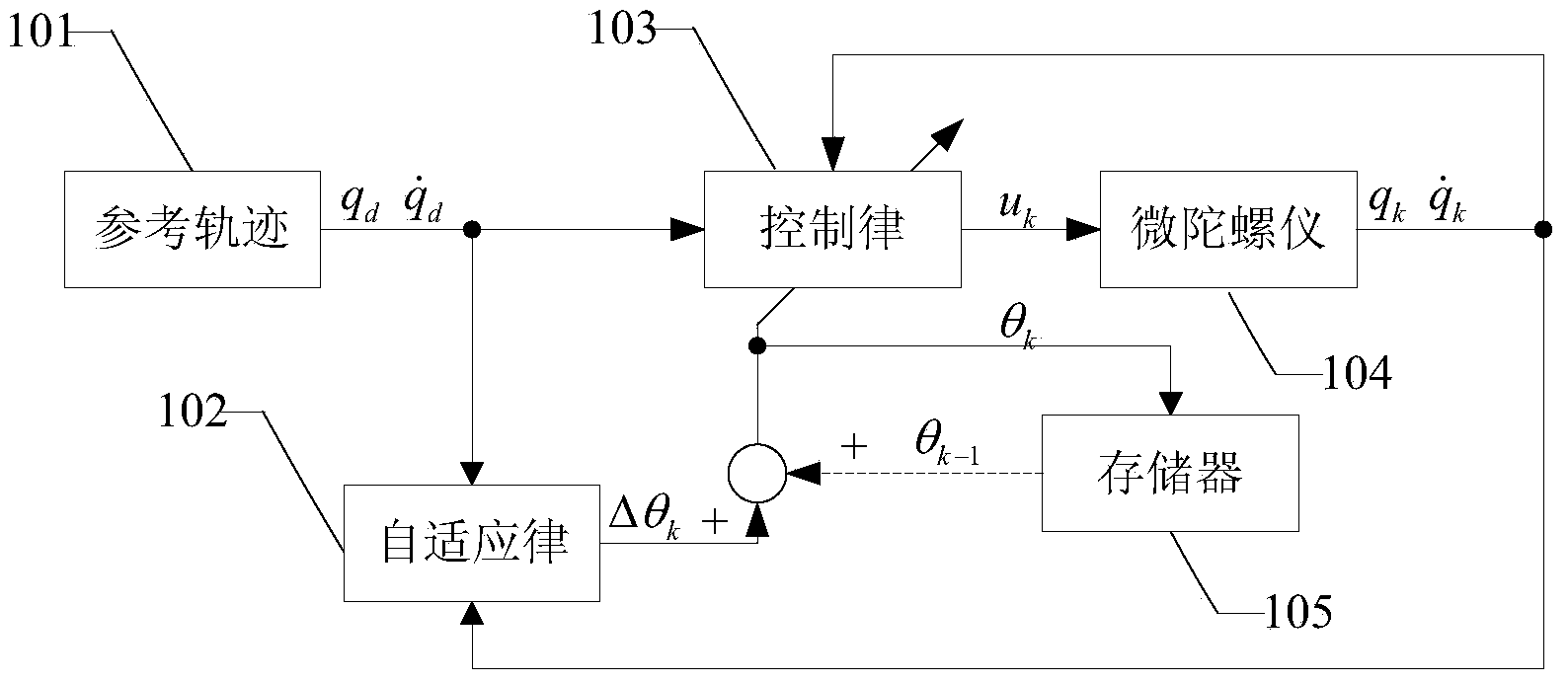
[0044] The adaptive iterative learning control method of the micro gyroscope of the present invention comprises the following steps:
[0045] 1) Establish a dimensionless dynamic model of the micro gyroscope;
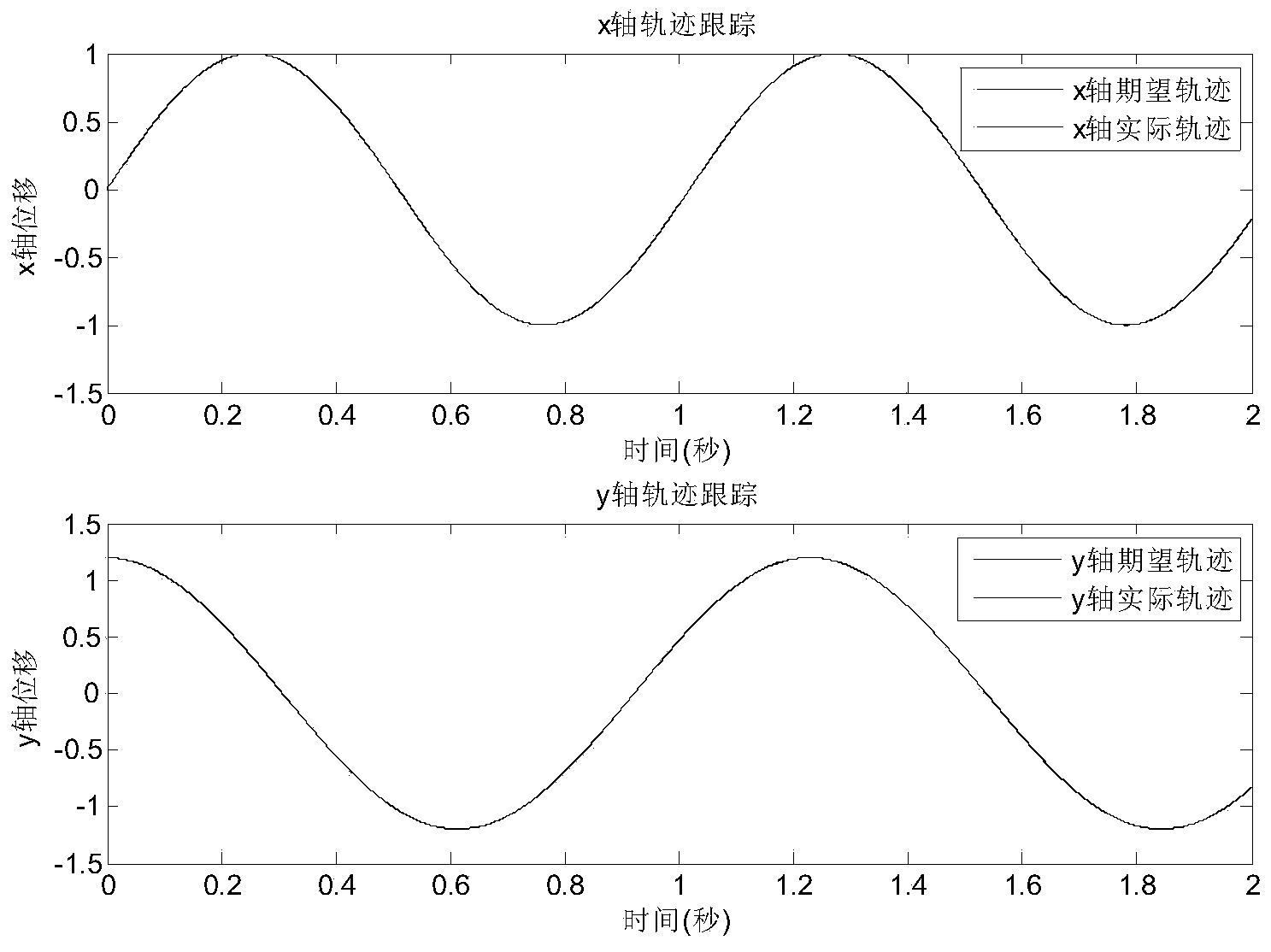
[0046] 2) The reference trajectory module outputs the reference trajectory of the x- and y-axis vibrations of the micro gyroscope, including position and speed signals;
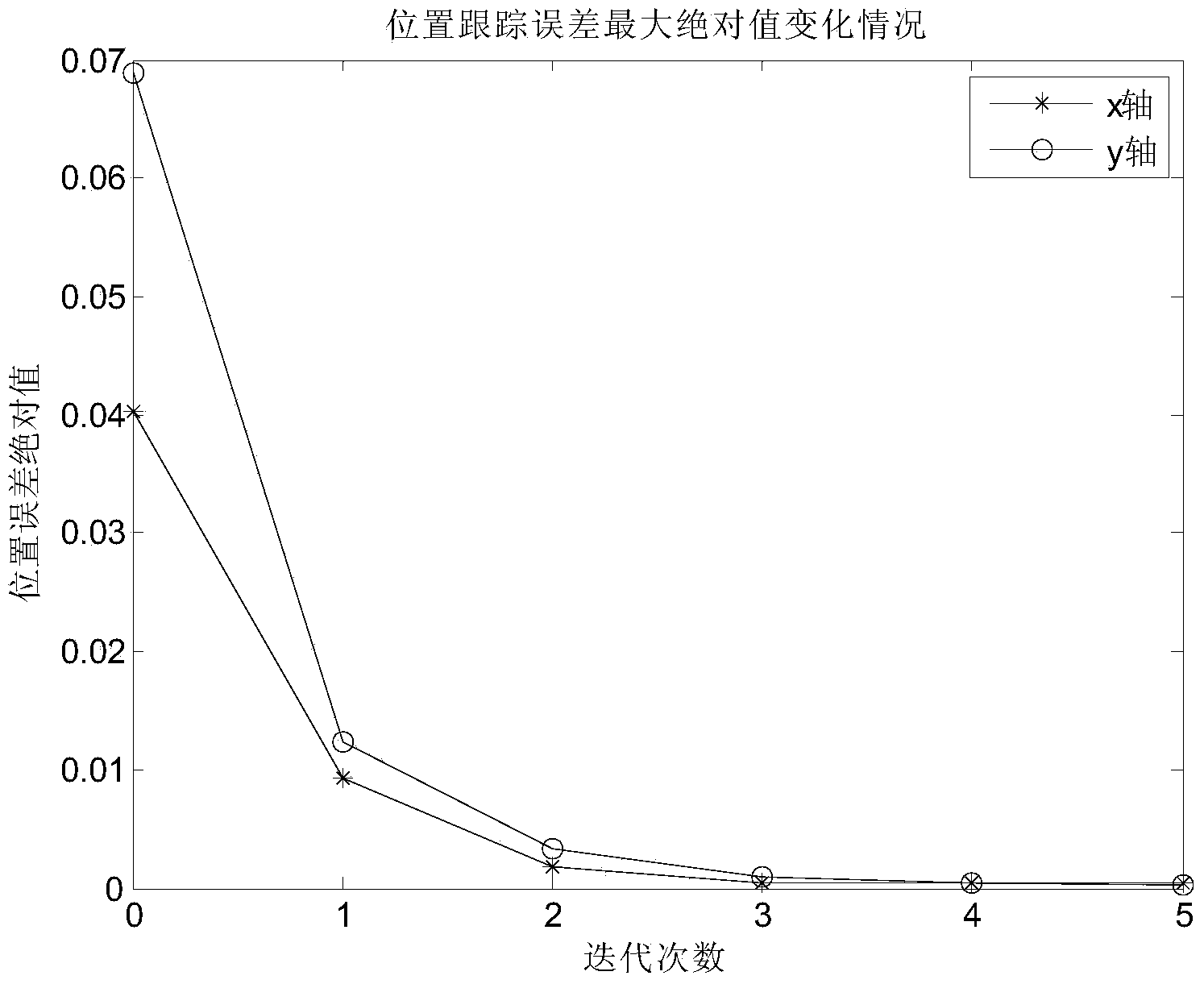
[0047] 3) The adaptive law module receives the reference trajectory and the output of the micro-gyroscope system, and uses the adaptive law to estimate the increment of the parameters;
[0048] 4) The controller module receives new parameter estimates, and interacts with the trajectory tracking error and the speed tracking error to generate the control signal output of the adaptive iterative learning control method;
[0049] 5) Receive the output signal of the controller module, and output the position and speed information of the vibrating part of the micro gyroscope;
[0050] 6) Step 3)-step 5) are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More