

Under-actuated surface vehicle trajectory tracking control system based on self-adaptive fuzzy observer
A technology of fuzzy self-adaptation and trajectory tracking, which is applied in the direction of self-adaptive control, general control system, control/regulation system, etc., and can solve problems such as omissions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below in conjunction with the accompanying drawings.
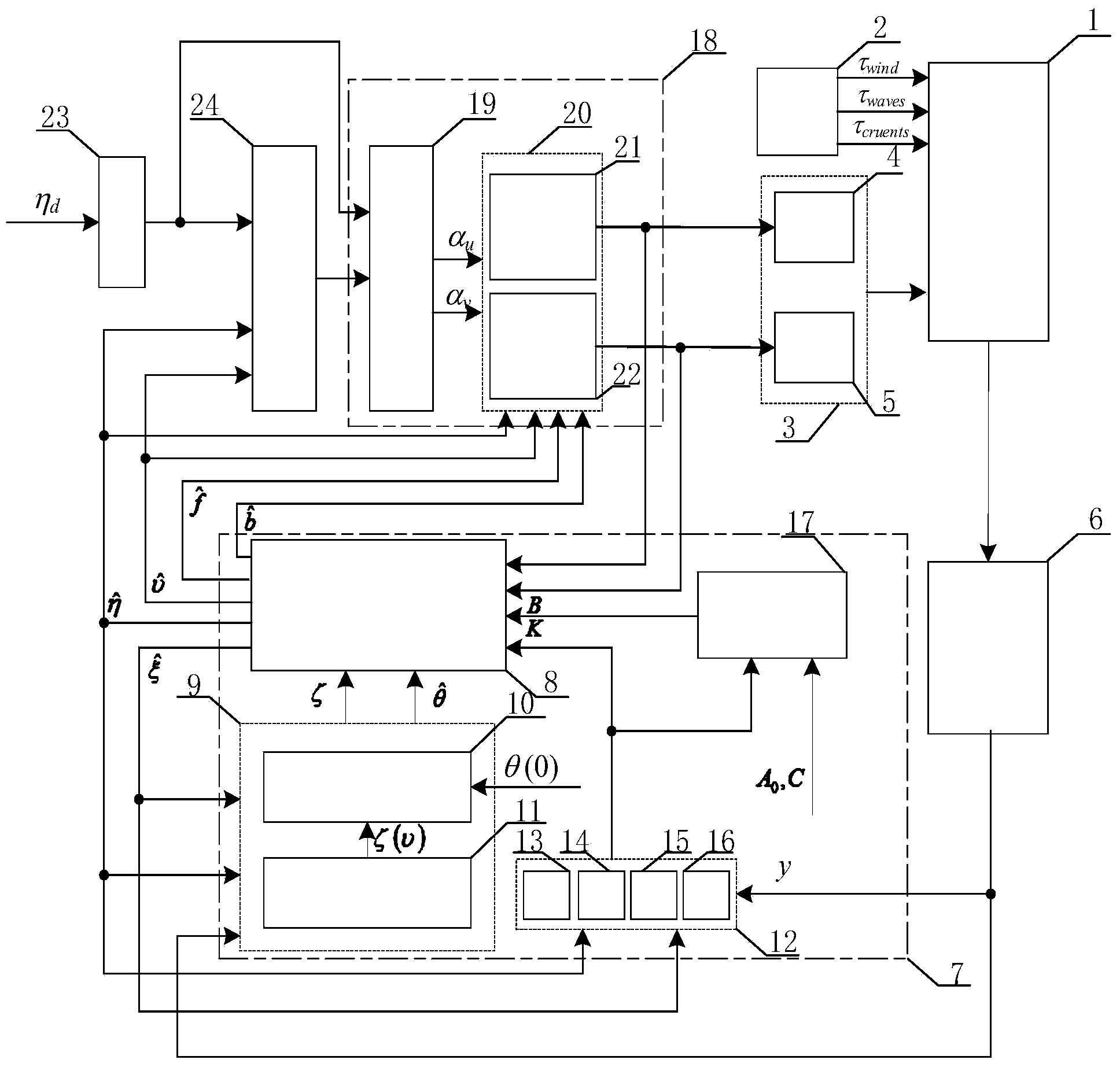
[0050] The present invention is based on fuzzy self-adaptive observer track tracking control system of underactuated surface craft, such as figure 1 Shown:
[0051] 1) The underactuated surface craft trajectory tracking control system based on the fuzzy adaptive observer of the present invention includes a sensor system 6, a fuzzy adaptive observer system 7, a fuzzy logic adaptive system 9, an observer error gainer 12, and a Riccati-like equation solution Device 17, controller 18, guidance system 23. Wherein the sensor system 6 includes position and heading sensors, the sensor system collects ship position and heading information, and at the same time, together with the estimated value of the position and heading state output by the observer and the estimated value of high-frequency disturbance, it is transmitted to the observer error gainer 12 . The fuzzy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More