

Magnetic-control bias momentum satellite attitude control method based on periodic Lyapunov equation
A bias momentum, attitude control technology, applied in attitude control, adaptive control, general control system and other directions, can solve the problem that the magnetic torque amplitude is easy to be saturated, the magnetic torque device control torque amplitude is limited and the system is not ideal. stability issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
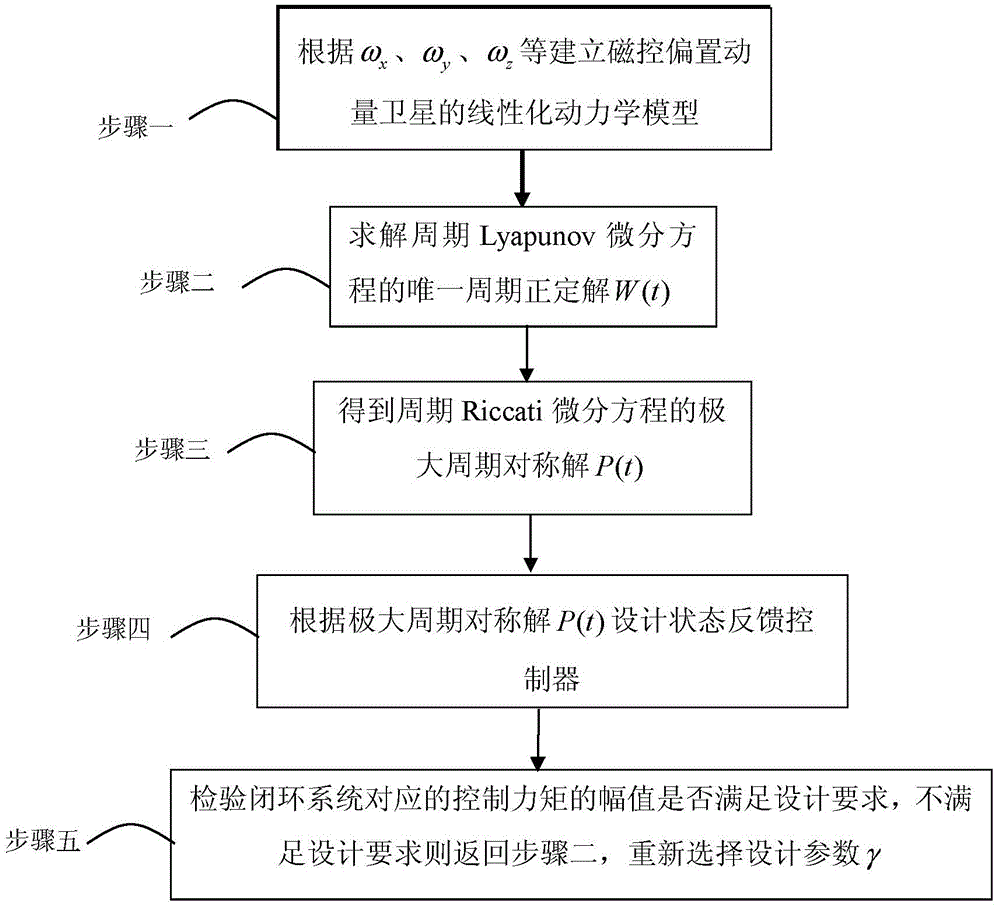
[0042] Specific embodiment one: the attitude control method of a kind of magnetron bias momentum satellite based on period Lyapunov equation of the present embodiment, specifically realize according to the following steps:
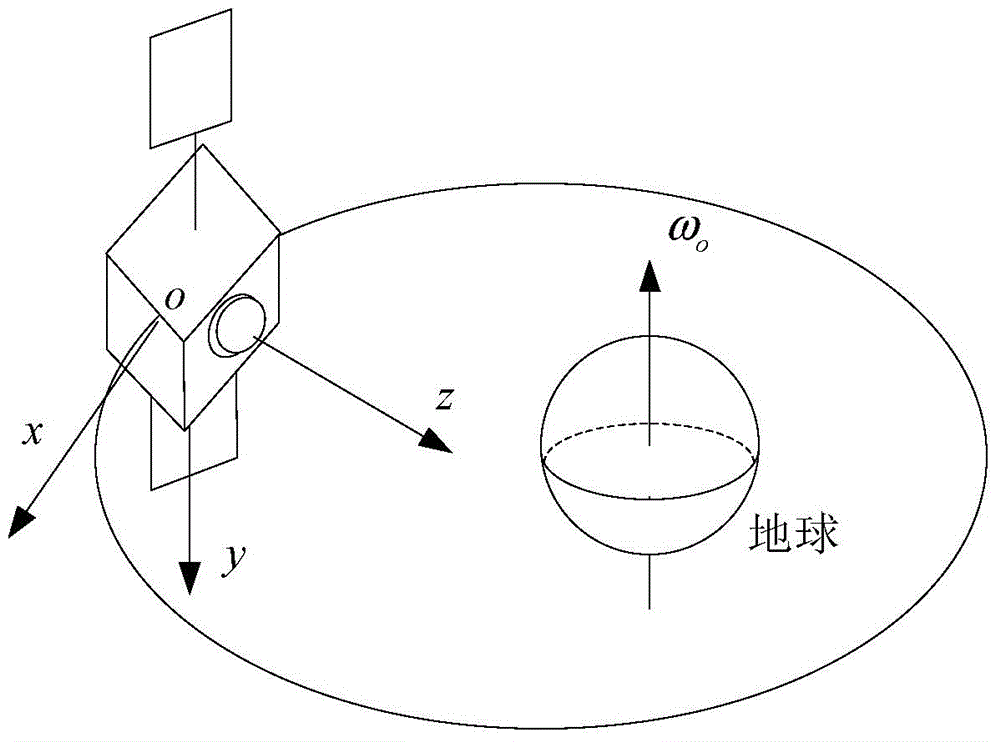
[0043] Step 1: Establish the satellite body coordinate system with the satellite center of mass as the origin o, fix the x, y and z axes on the satellite body, according to ω x , ω y , ω z Establish the linearized dynamic model of the magnetron bias momentum satellite, that is, the attitude dynamic equation of the bias momentum satellite; where the x-axis points forward along the longitudinal symmetry axis of the satellite, and the y-axis points downward perpendicular to the x-axis in the longitudinal symmetry plane of the satellite , the z-axis is perpendicular to the oxy plane, the direction of the z-axis follows the right-hand spiral rule, the x-axis is the roll axis, the y-axis is the pitch axis and the z-axis is the yaw axis; ω x , ωy , ω z is the ...
specific Embodiment approach 2
[0058] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in step 1, the satellite body coordinate system is established with the satellite center of mass as the origin o, and the x, y and z axes are fixed on the satellite body, according to ω x , ω y , ω z The specific process of establishing the linearized dynamic model of the magnetron bias momentum satellite, that is, the attitude dynamic equation of the bias momentum satellite, is as follows:
[0059] I ω · + ω × ( Iω + h ) = - h · + T
[0060] In the formula, ω=[ω x ω y ω z ] T is the rotational angular velocity of the satellite body coordinate system relative to the geocentric inertia coordinate system, is the change rate of the rotation ...
specific Embodiment approach 3
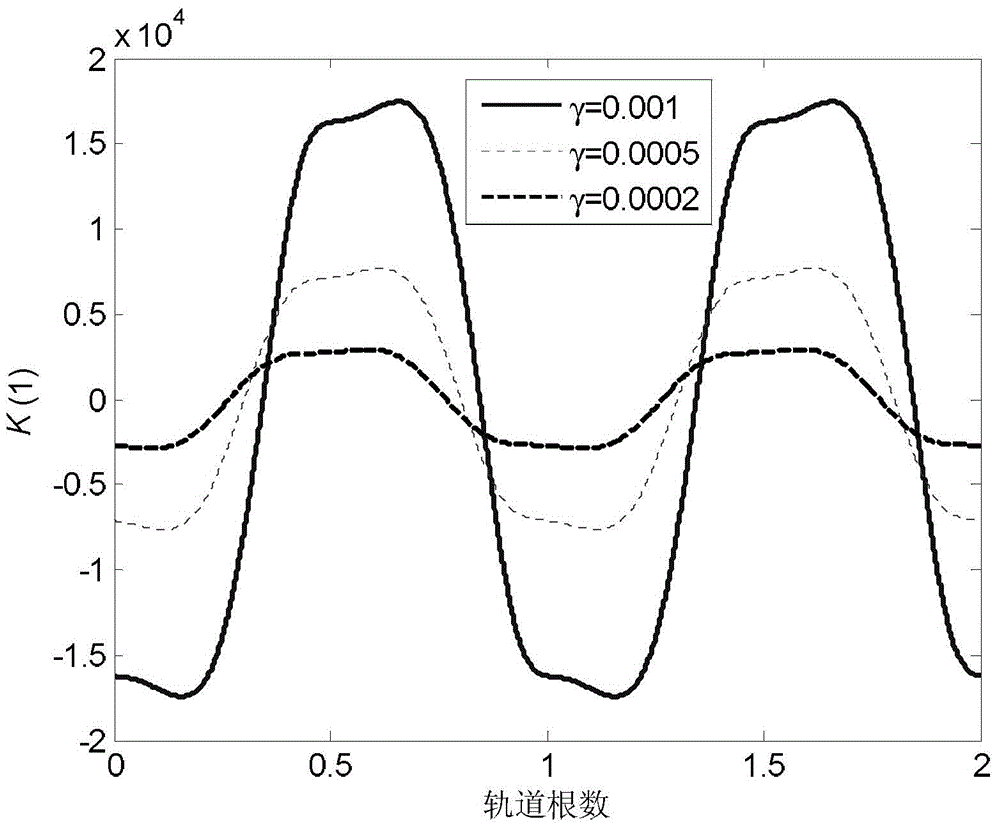
[0093] Specific embodiment three: what this embodiment is different from specific embodiment one or two is: select design parameter γ in step 2, i.e. scalar function γ, the specific process of solving periodic Lyapunov differential equation is:
[0094] (1), the periodic Lyapunov differential equation is:
[0095] W · ( t ) = W ( t ) A T + AW ( t ) + γ ( t ) W ( t ) - B ( t ) R - 1 ( t ) B T ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More