A Method of Attitude Control for Magnetron Bias Momentum Satellite Based on Periodic Lyapunov Equation
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of bias momentum and attitude control, applied in attitude control, adaptive control, general control system, etc. Saturation and other issues
Active Publication Date: 2016-08-17
哈尔滨工业大学人工智能研究院有限公司
View PDF1 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0006] The purpose of the present invention is to solve the limitation of the magnetic torque control torque amplitude that is easily saturated and cause system instability, the limitation of the magnetic torque device control torque amplitude that the PID controller solves is not ideal and the objective function weighting matrix of the optimal control design method A method for attitude control of magnetron biased momentum satellites based on the periodic Lyapunov equation is proposed for the problem that it is difficult to establish a quantitative relationship with the performance index of the actual system
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
[0042] Specific embodiment one: the attitude control method of a kind of magnetron bias momentum satellite based on period Lyapunov equation of the present embodiment, specifically realize according to the following steps:
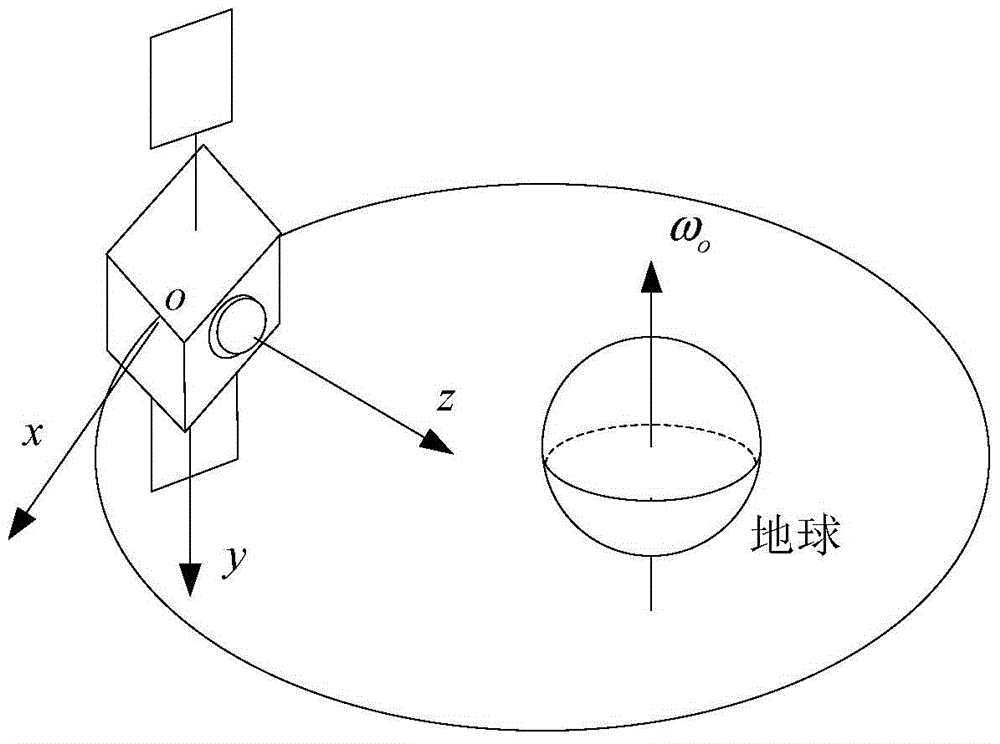
[0043] Step 1: Establish the satellite body coordinate system with the satellite center of mass as the origin o, fix the x, y and z axes on the satellite body, according to ω x , ω y , ω z Establish the linearized dynamic model of the magnetron bias momentum satellite, that is, the attitude dynamic equation of the bias momentum satellite; where the x-axis points forward along the longitudinal symmetry axis of the satellite, and the y-axis points downward perpendicular to the x-axis in the longitudinal symmetry plane of the satellite , the z-axis is perpendicular to the oxy plane, the direction of the z-axis follows the right-hand spiral rule, the x-axis is the roll axis, the y-axis is the pitch axis and the z-axis is the yaw axis; ω x , ωy , ω z is the ...
specific Embodiment approach 2
[0058] Specific embodiment two: the difference between this embodiment and specific embodiment one is that in step one, the satellite body coordinate system is established with the center of mass of the satellite as the origin o, and the x, y and z axes are fixed on the satellite body, according to ω x , ω y , ω z The specific process of establishing the linearized dynamic model of the magnetron bias momentum satellite, that is, the attitude dynamic equation of the bias momentum satellite, is as follows:
[0059] I ω · + ω × ( Iω + h ) = - h · + T
[0060] In the formula, ω=[ω x ω y ω z ] T is the rotational angular velocity of the satellite body coordinate system relative to the geocentric inertia coordinate system, is the change rate of...
specific Embodiment approach 3
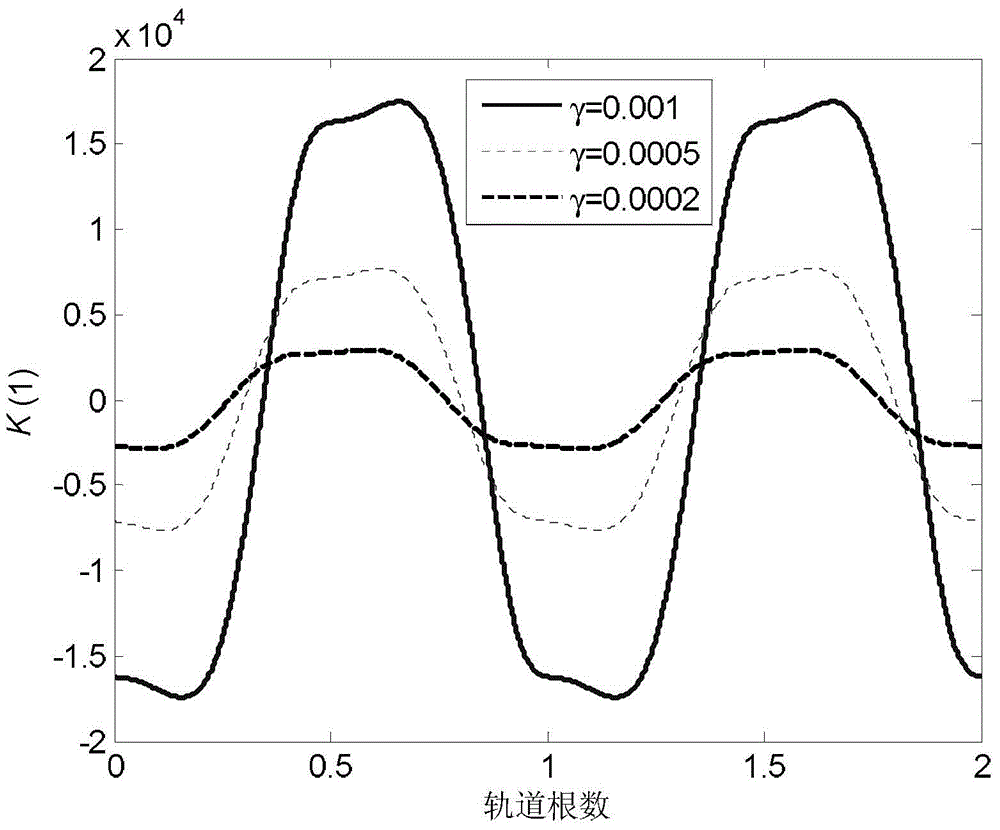
[0093] Specific embodiment three: what this embodiment is different from specific embodiment one or two is: select design parameter γ in step 2, i.e. scalar function γ, the specific process of solving periodic Lyapunov differential equation is:
[0094] (1), the periodic Lyapunov differential equation is:
[0095] W · ( t ) = W ( t ) A T + AW ( t ) + γ ( t ) W ( t ) - B ( t ) R - 1 ( t ) B T ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
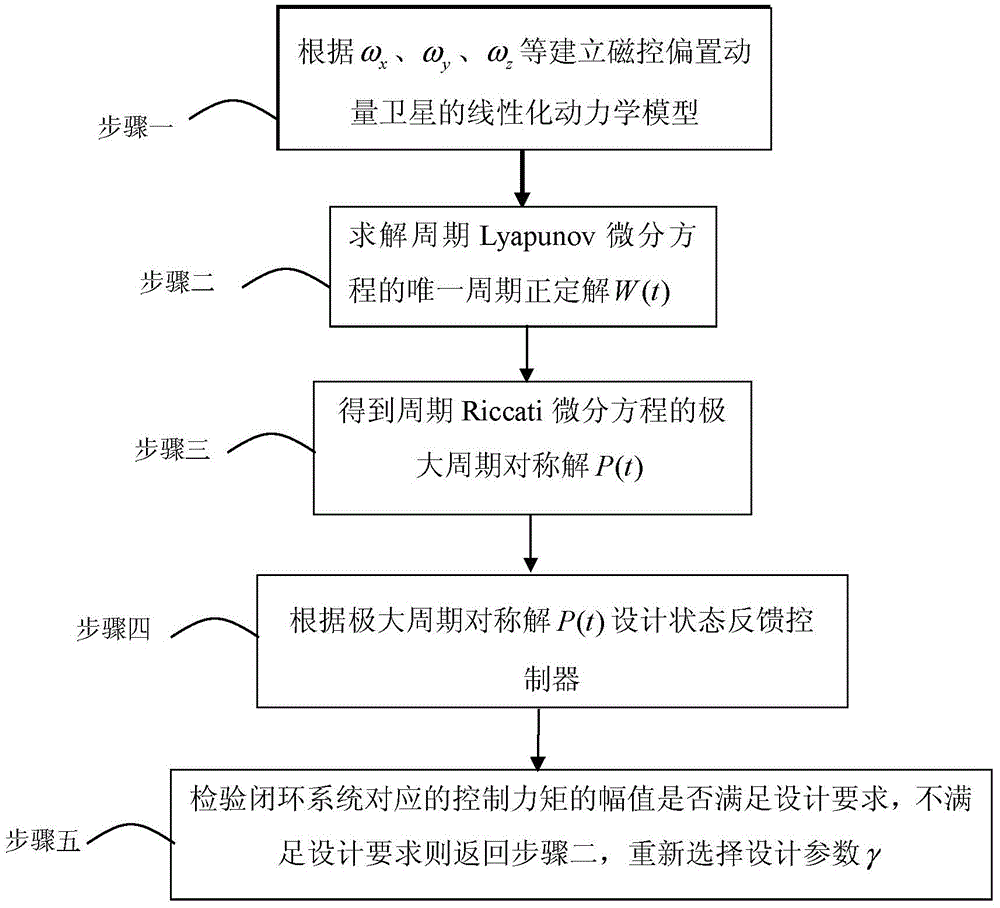
The invention relates to an attitude control method of a magnetic control bias momentumsatellite based on a periodic Lyapunov equation, and the invention relates to a magnetic control bias momentumsatelliteattitude controlsystem. The present invention is to solve the problem that the magnitude of the magnetic control torque is limited and the selection of the weighting matrix of the traditional optimal control design method is difficult to establish a quantitative relationship with the performance index of the actual system, and a magnetic control bias based on the periodic Lyapunov equation is proposed. Attitude control method for momentum satellites. The method is through 1. Establishing a linearized dynamic model of the magnetron bias momentum satelliteattitude controlsystem; 2. Solving the symmetric positive definite solution W(t) of the periodic Lyapunov differential equation; 3. Obtaining the symmetric positive definite solution of the periodic Riccati differential equation P(t); 4. Get the state feedback controller; 5. Check the control effect and the amplitude of the control torque. The invention is applied to the field of attitude control of magnetic control bias momentum satellites.
Description
technical field [0001] The invention relates to an attitude control method of a magnetron bias momentum satellite based on a periodic Lyapunov equation. Background technique [0002] The magnetic control bias momentum system has many excellent characteristics and is widely used in satellite attitude control. On the one hand, the magnetic control torque uses the earth's magnetic field to generate control torque. As a semi-passive actuator, it can support the satellite's long-term operation; on the other hand, the bias momentum system does not require a yaw attitude sensor, making the satellite structure Simple, low cost, and high reliability. Attitude stabilization control of magnetron bias momentum satellites has been the focus of research at home and abroad. [0003] The magnetic torque of a certain type of magnetic torque device is fixed, so the amplitude of the control torque that the magnetic torque device can provide is limited. The boundedness of the control signal ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More