

A multi-industrial manipulator controller based on double-layer cpg
A technology for industrial machinery and controllers, applied in the field of multi-industrial manipulator controllers, can solve problems such as insufficient stability, poor impact resistance, weak collective cooperation and information interaction capabilities of manipulators, and achieve improved information utilization and high Effects on Reliability and Stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
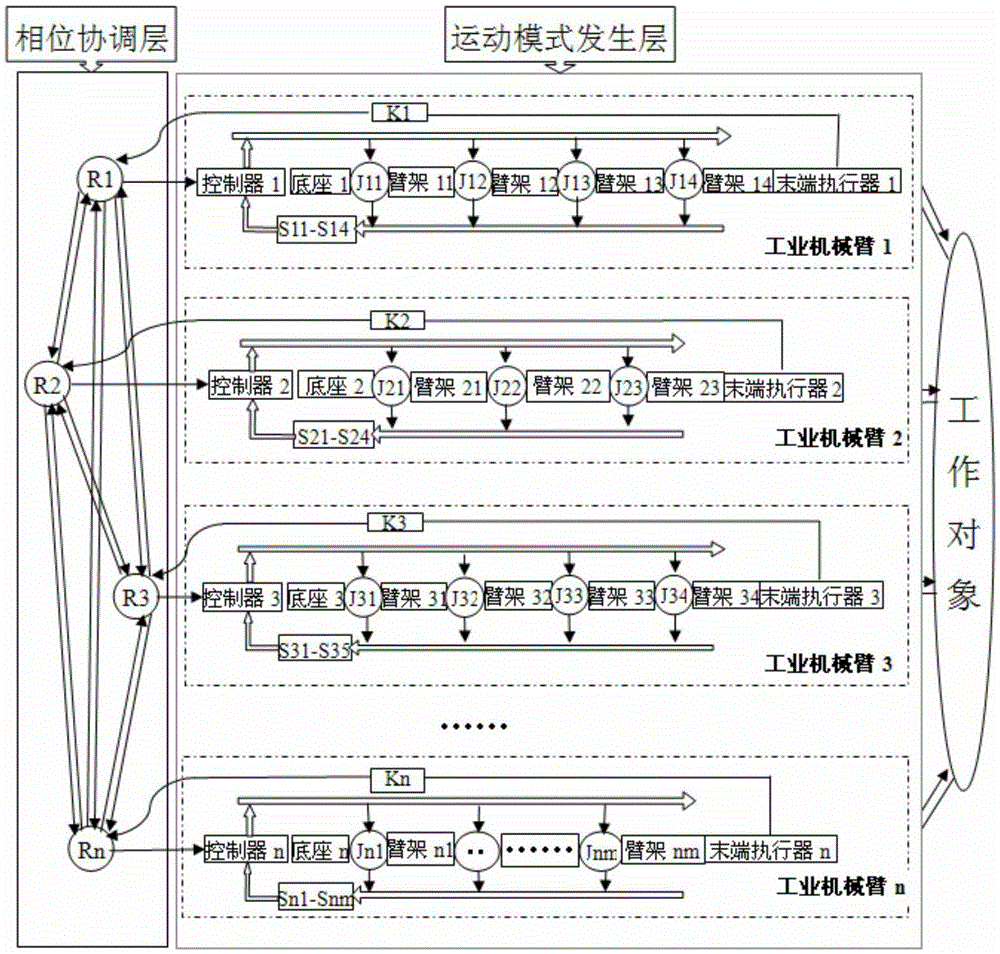
[0024] In this embodiment, a multi-industrial manipulator controller based on a double-layer CPG is used for heavy object handling operations. In industrial production, some large and heavy objects are difficult to complete the handling operation by relying on a single industrial robot arm, and require the coordination of multiple industrial robot arms to complete the handling. Initially, each industrial robot arm approaches the heavy object according to the initialization setting. When the end effector of one of the multiple industrial manipulators contacts the heavy object, the contact signal is transmitted to the rhythm generator corresponding to the manipulator through the tactile sensor of the industrial manipulator contacting the heavy object. The phase coordination layer of the multi-industrial manipulator controller makes a decision based on the signal input from the rhythm generator of the industrial manipulator that is in contact with the heavy object, so that the mo...
Embodiment 2
[0026]In this embodiment, a multi-industrial manipulator controller based on a double-layer CPG is used to perform synchronous operation of multi-industrial manipulators. In industrial production, sometimes multiple industrial manipulators need to operate synchronously. The multi-industrial manipulator controller can simultaneously adjust the phase coordination layer and motion mode generation layer of the controlled multiple industrial manipulators to ensure that each industrial manipulator maintains Highly consistent synchronous operations. For the phase coordination layer, at the beginning, the rhythm generators of each industrial robot arm in the phase coordination layer complete phase sequence locking, so that each industrial robot arm keeps moving synchronously. When asynchronous movement occurs, the phase coordination layer will adjust according to the initial phase sequence lock, so that the industrial mechanical arms will maintain synchronous movement again, and the p...
Embodiment 3
[0028] In this embodiment, a multi-industrial manipulator controller based on a double-layer CPG is used to control the sequential operation of multiple industrial manipulators. In industrial production, sometimes multiple industrial robotic arms are required to perform operations in a certain sequence, such as machine assembly and assembly of workpieces. Initially, according to the initialization settings and actual requirements, one or more industrial manipulators of each industrial manipulator perform work. When the industrial manipulator performing the work completes the set operation, the tactile sensor of the end effector of the industrial manipulator The signal is transmitted to the corresponding rhythm generator, and the phase coordination layer of the multi-industrial manipulator makes a decision according to the signal input of the end effector of the industrial manipulator, so that the industrial manipulator that has completed the set operation is reset, and at the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More