Manipulator actuator fault tolerant control system based on double-layer structure and method thereof
A fault-tolerant control, double-layer structure technology, applied in general control systems, control/regulation systems, test/monitoring control systems, etc. Coupling and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] In order to understand the present invention more intuitively, a detailed description of the present invention is given in conjunction with the accompanying drawings.
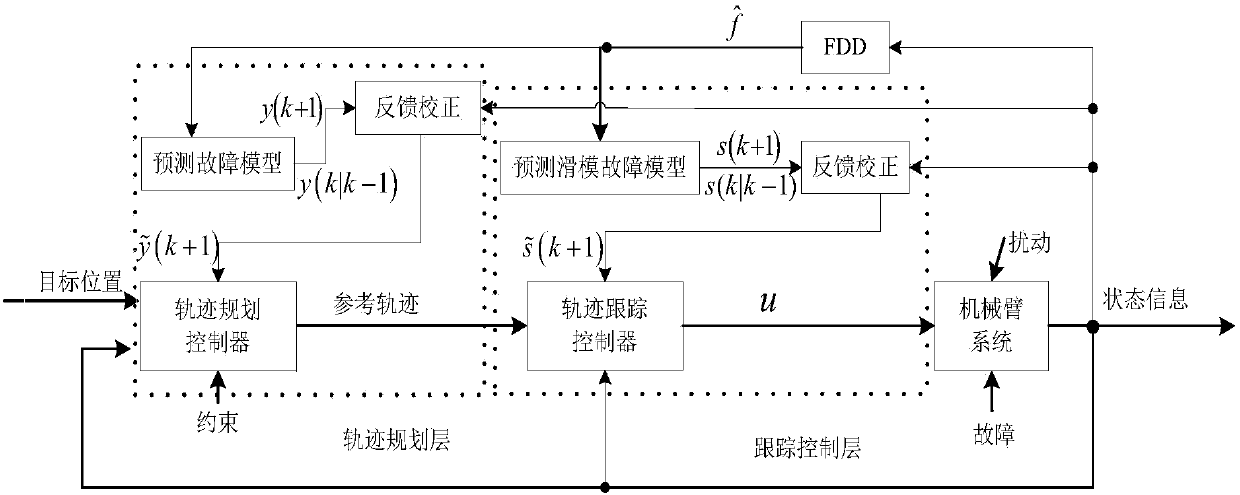
[0070] Such as figure 1 As shown, the present invention is based on the double-layer structure of the manipulator actuator fault-tolerant control system, which uses the Taylor series expansion to establish a discrete fault model of the manipulator actuator under the constant deviation fault of the actuator, so as to reduce the amount of calculation and improve the calculation efficiency , to improve real-time performance.
[0071] The fault-tolerant controller of the manipulator includes a trajectory planning layer and a tracking control layer. Information is exchanged between the two layers. According to the different control objectives of each layer, the controller is designed separately, which is more targeted to the problem. Among them, the trajectory planning layer is based on MPC control synthesis ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More