

Gyroscope dynamic calibration method for measuring rotary carrier transversal posture
A gyroscope and carrier technology, applied in the field of inertial sensing, can solve problems such as installation errors and failure to meet the use requirements, and achieve the effects of eliminating installation errors, reducing calibration workload, and improving measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
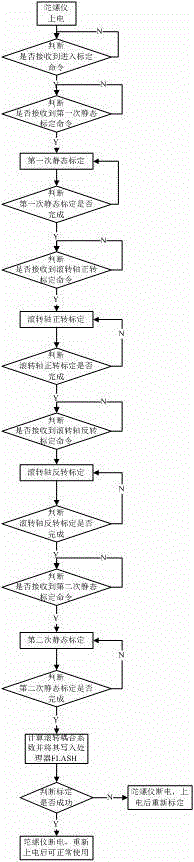
[0027] The present invention is used for the gyroscope dynamic calibration method of rotating carrier lateral attitude measurement, and the steps are as follows,
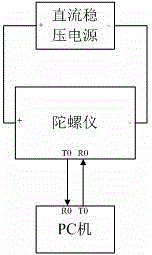
[0028] 1) Install the gyroscope in the rotating carrier first, then install the rotating carrier on the high-speed turntable, and make the rolling axis of the gyroscope perpendicular to the surface of the high-speed turntable;
[0029] 2) Then use the speed test method to identify the installation error of the gyroscope in each direction of the gyroscope relative to the rolling direction from the gyroscope error model installed inside the gyroscope and obtain the compensation coefficient, and write the compensation coefficient online to the processor inside the gyroscope In FLASH; the compensation coefficient is the preliminary calibration result;
[0030] 3) Finally, judge the correctness of the preliminary calibration result; when the preliminary calibration result is within the set compensation coefficient range,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More