

Compliant control method of wheel foot type robot
A compliant control and robot technology, applied in the field of robot control, can solve problems affecting the controllability of the robot body pose, the expansion of the dimension of the control target vector, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
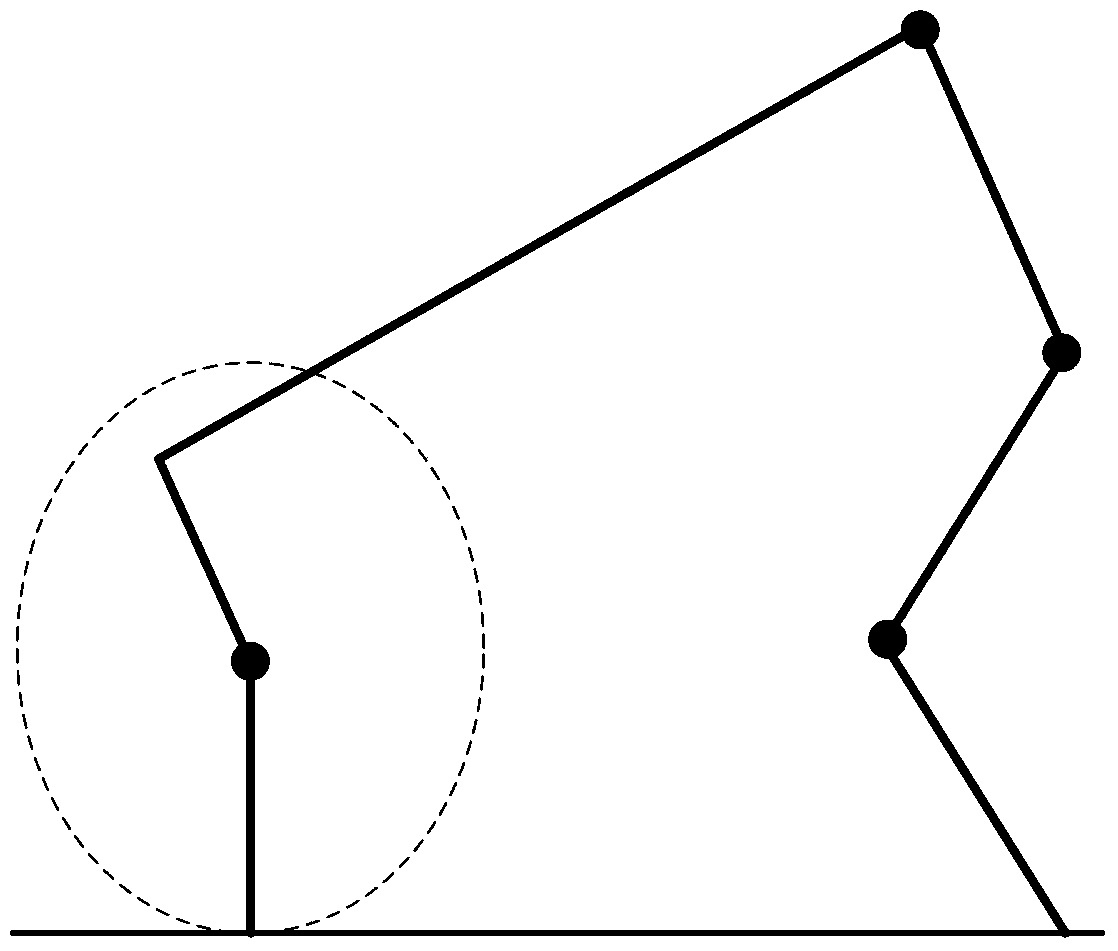
[0060] The present invention is mainly applied to the wheel-foot robot system, and the main object is that the wheel-type mechanism and the foot-type mechanism are independent of each other in the installation mode, and the wheel-foot robot does not have a driving device for the wheel mechanism, that is, the wheels are driven wheels. The robot relies on active joint motion of the legs. Such as figure 1 As shown, the wheel-footed robot system consists of two legs and two driven wheels, each leg contains four active joints (ankle joint, knee joint, hip joint, hip lateral joint), each active joint Driven by a hydraulic actuator, the foot end is in point contact with the ground. Each active joint is equipped with a displacement sensor and a force sensor, which are used to detect the length information of the actuator and the joint force...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More