

Multiple mobile beacon set moving path planning method based on network density clustering of wireless sensor network
A wireless sensor and mobile beacon technology, applied in wireless communication, network topology, electrical components, etc., can solve the problems of increasing network positioning time, beacon moving path and network positioning time, limitations, etc., to achieve positioning rate and positioning accuracy. The effect of improving the network positioning time, reducing the network positioning time, and improving the network positioning rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
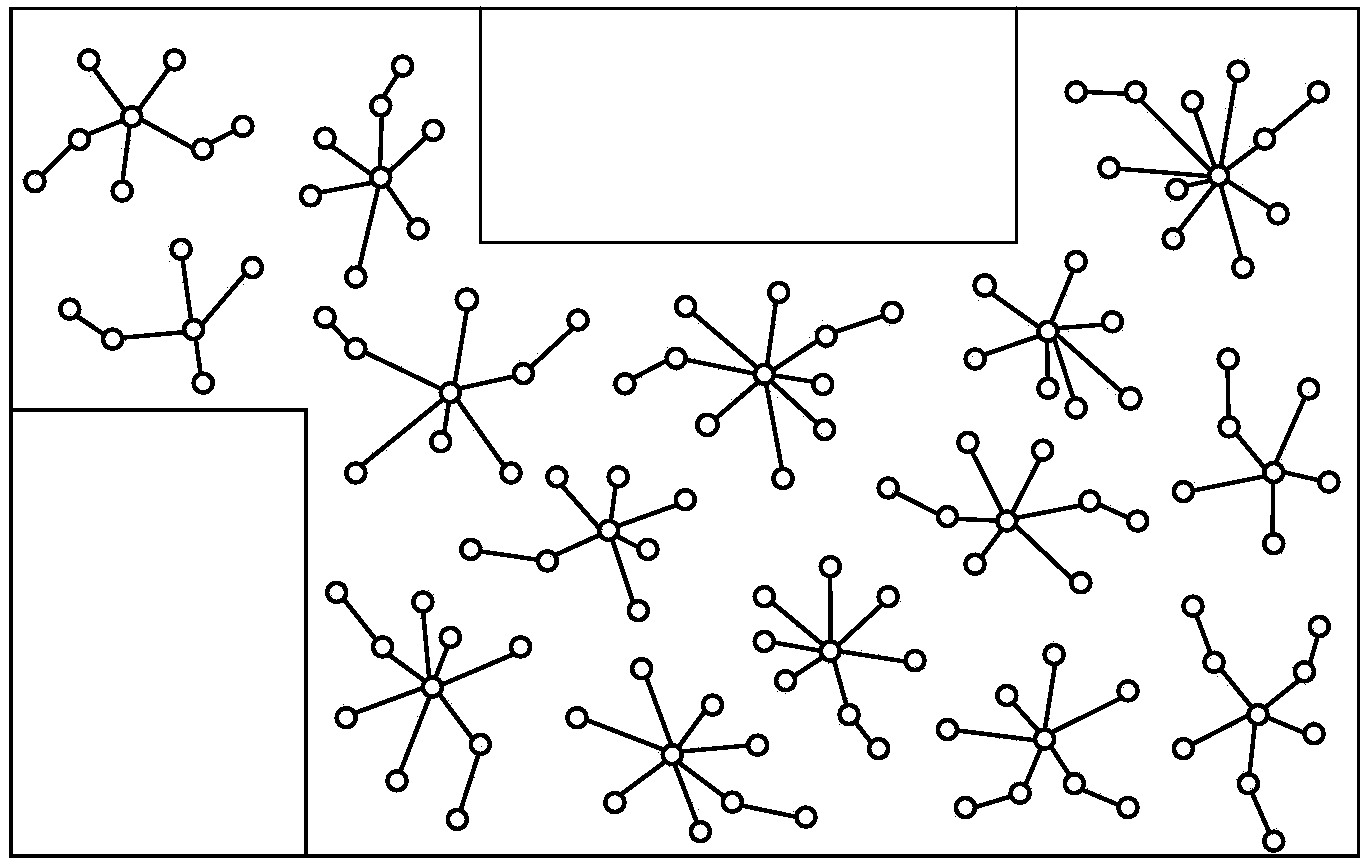
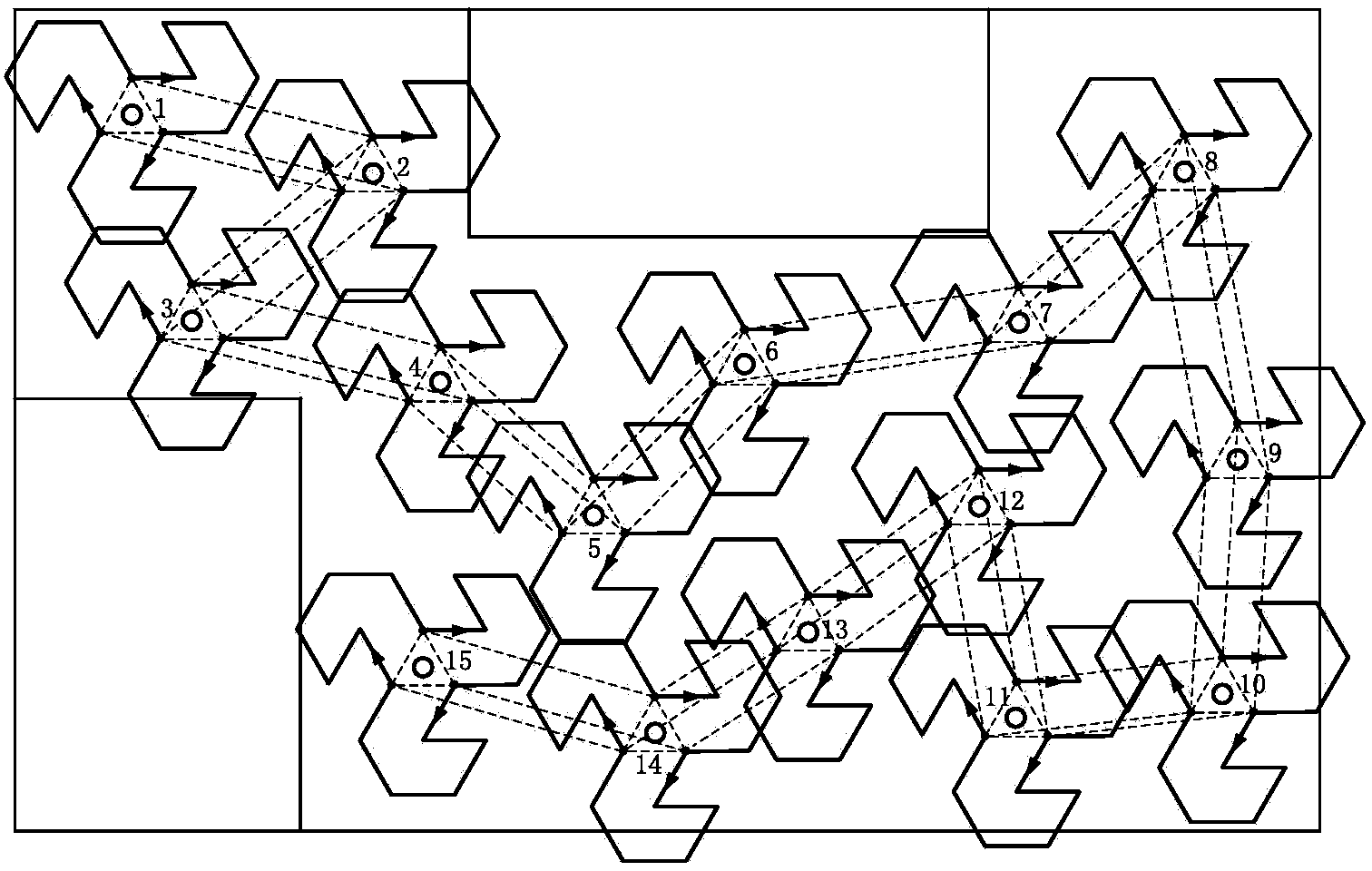
[0074] n=2, that is, when the number of hops in the cluster is 2, the network clustering result is as follows figure 2 shown. After determining the location of the cluster head, the mobile beacons perform global path planning to determine the sequence of traversing the cluster heads. The three mobile beacons are located at the vertices of the regular triangle with length R, and keep their relative positions unchanged, moving at a constant speed v , traverse all the cluster heads sequentially, such as image 3 shown.
[0075] In the process of local path planning, the three mobile beacons take the position of the cluster head as the center of the regular triangle, respectively follow the regular hexagonal path with side length a=R, and a=vt, such as image 3 shown. The three mobile beacons perform a partial path planning in each cluster, and the position of the beacon is rotated once, and then the relative position of the regular triangle is still maintained to move to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More