

A Fast Digital Image Stabilization Method for Space Robot Vision System
A technology of space robot and vision system, applied in the parts of TV system, parts of color TV, TV, etc., can solve the problems of cumbersome processing, large amount of calculation of phase method, difficulty in guaranteeing real-time performance, etc., and achieve time-complexity The effect of low accuracy, high prediction and compensation accuracy, and elimination of normal scanning components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, and do not limit it in any way.
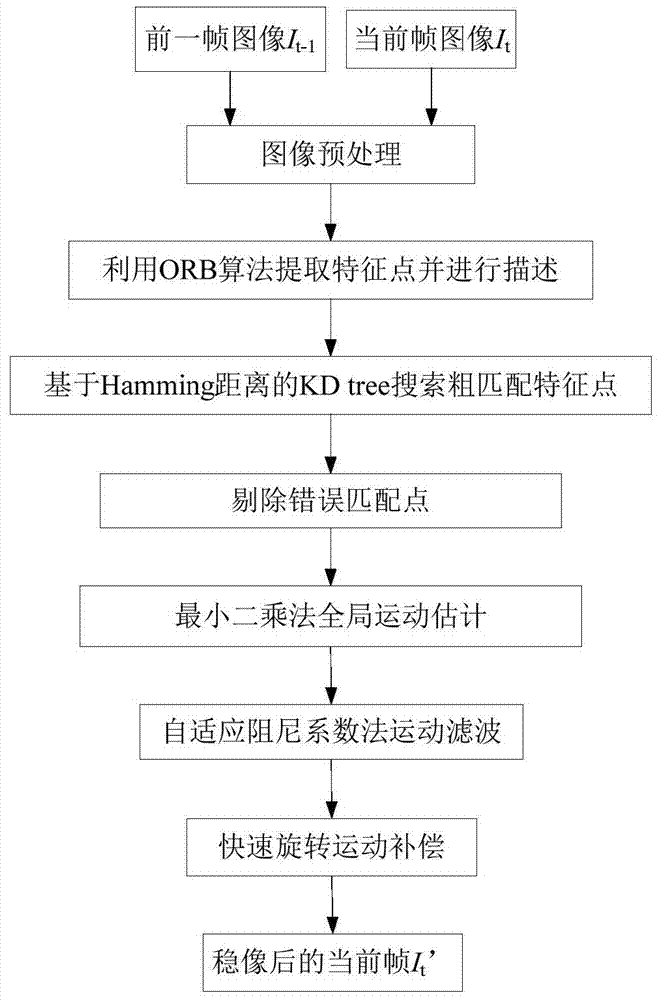
[0055] Such as figure 1 As shown, a kind of fast digital image stabilization technology suitable for space motion platform provided by the embodiment of the present invention includes:
[0056] (1) Image acquisition:
[0057] Using a monocular camera to collect two consecutive frames of images I t-1 (x,y) and I t (x,y).
[0058] (2) Image preprocessing:
[0059] For the collected image I t-1 (x,y) and I t (x, y) are respectively subjected to median filtering, Wiener filtering and grayscale processing to obtain the image pair I t-1 (x',y') and I t (x',y'), where I t-1 (x’,y’) is defined as the reference frame, I t (x',y') is defined as the current frame.
[0060] (3) Local motion estimation:
[0061]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More