

Series-parallel four-degree-of-freedom transferring and stacking robot
A technology of palletizing robots and degrees of freedom, which is applied in the field of palletizing machinery, can solve the problems of large force at the fulcrum of the lever, large driving force, and difficult wiring, and achieve the effect of stable movement and high handling efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific implementation manner of the present invention will be described in detail below in combination with the technical scheme and accompanying drawings.
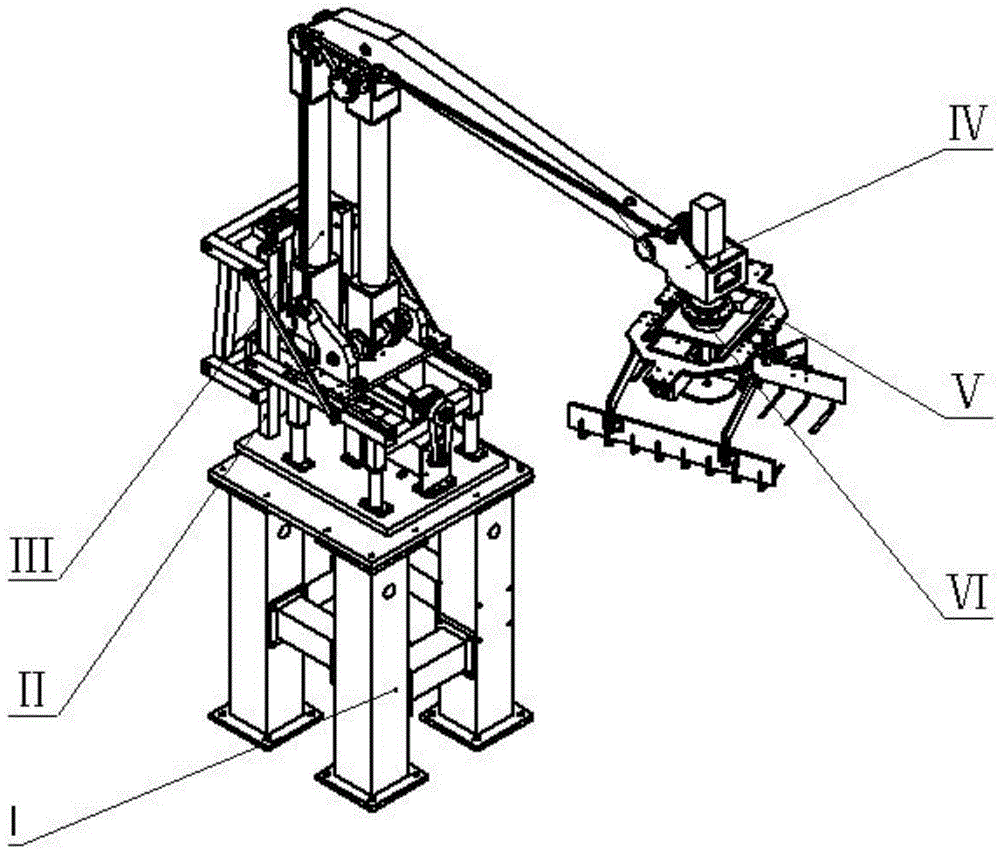
[0024] Such as figure 1 As shown, the series-parallel four-degree-of-freedom grain production line handling and palletizing robot of the present invention is composed of a bracket I, an arm mechanism II, a welding frame III, a wrist mechanism V, a hand grip VI and a wrist level holding mechanism IV, and adopts electric control and Driven by the pneumatic system, the waist of the robot can be rotated, the two-dimensional translation of the wrist in the plane formed by the big and small arms, and the hand can rotate around the wrist and grasp and press the bag.
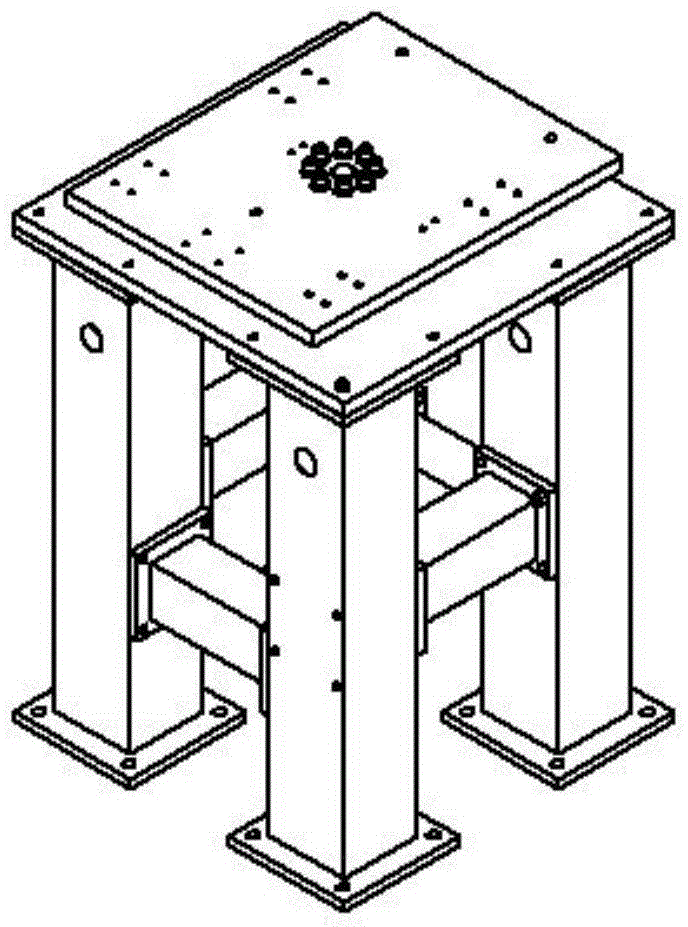
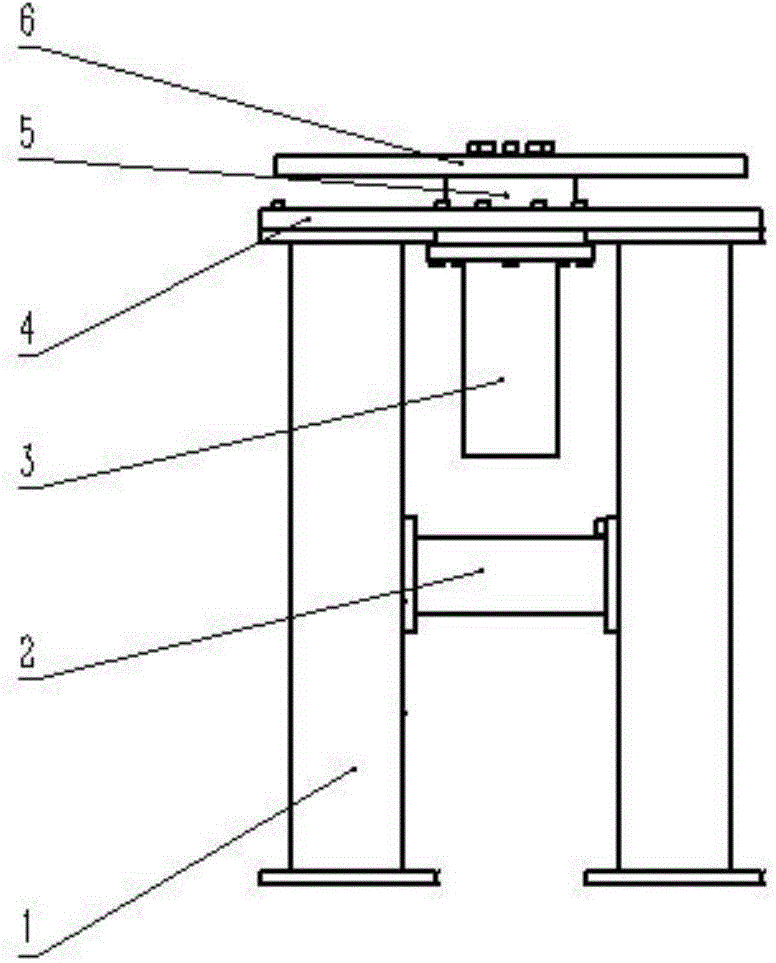
[0025] Such as figure 2 , 3 As shown, the support 1 includes a support leg 1, a support leg beam 2, a waist base plate 4, a rotating base plate 6, a waist servo motor 3 and a harmonic reducer 5; the waist base plate 4 is installed on the support leg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More