

Non-contact high-precision calibration method and application of base reference coordinate system of robot
A technology of base coordinate system and calibration method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
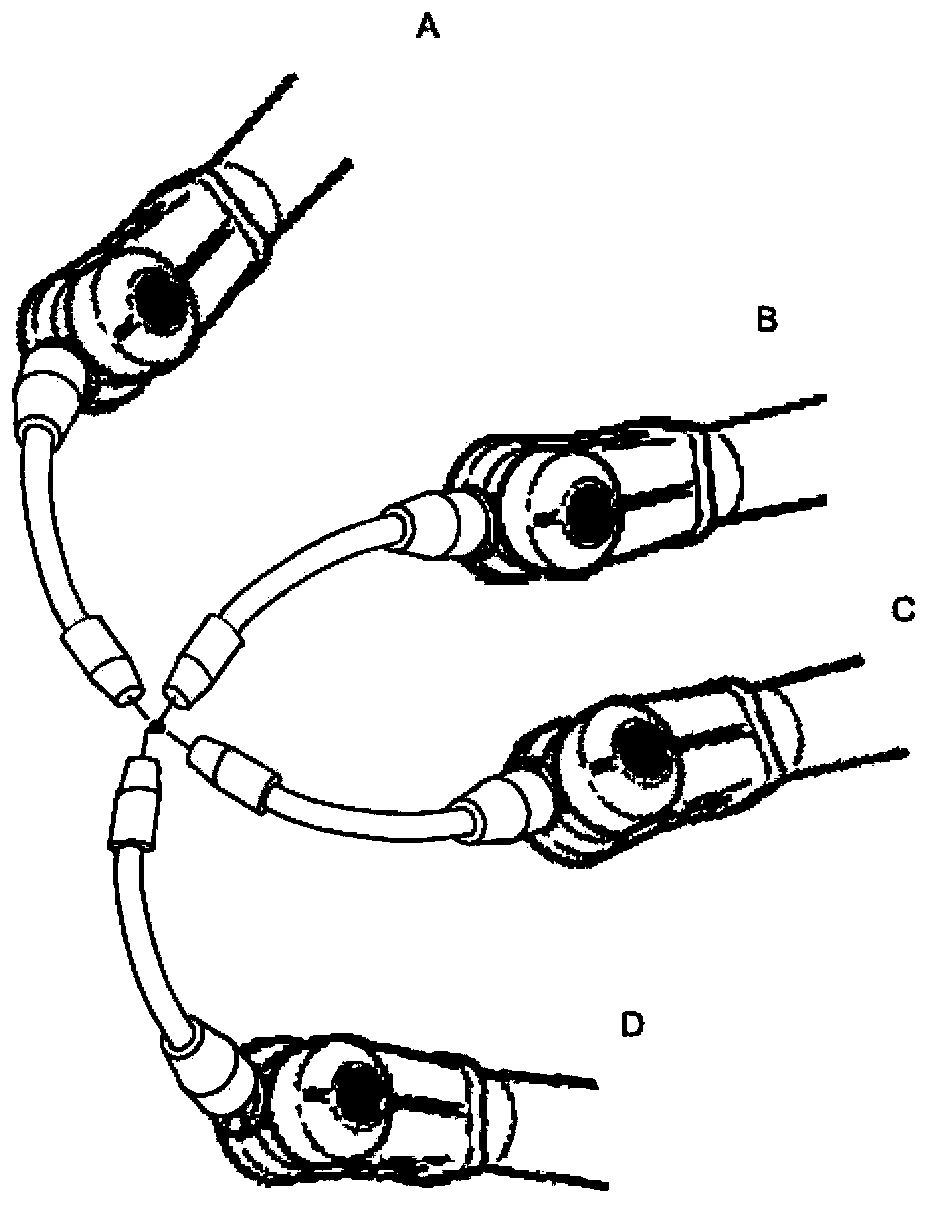
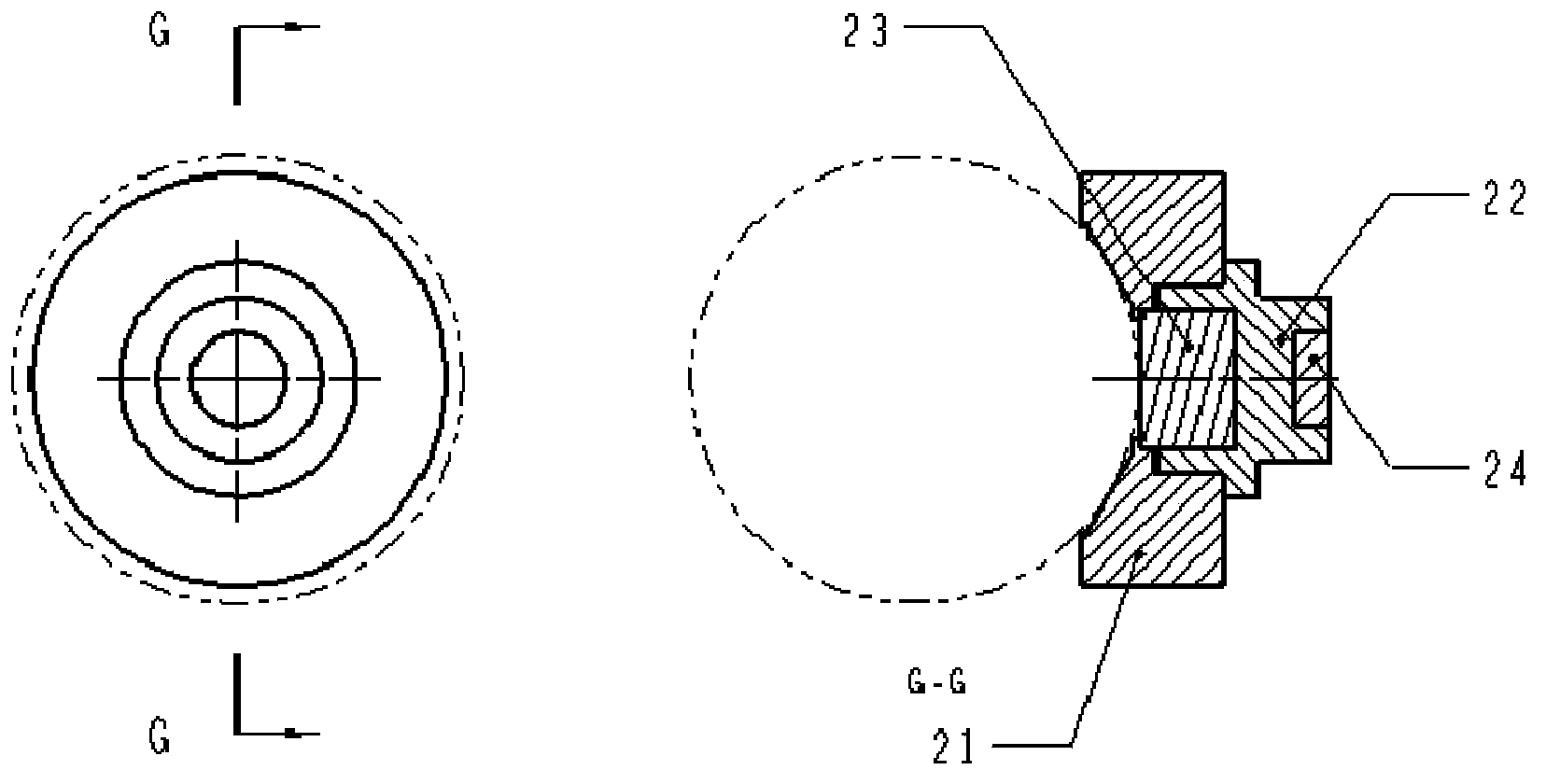
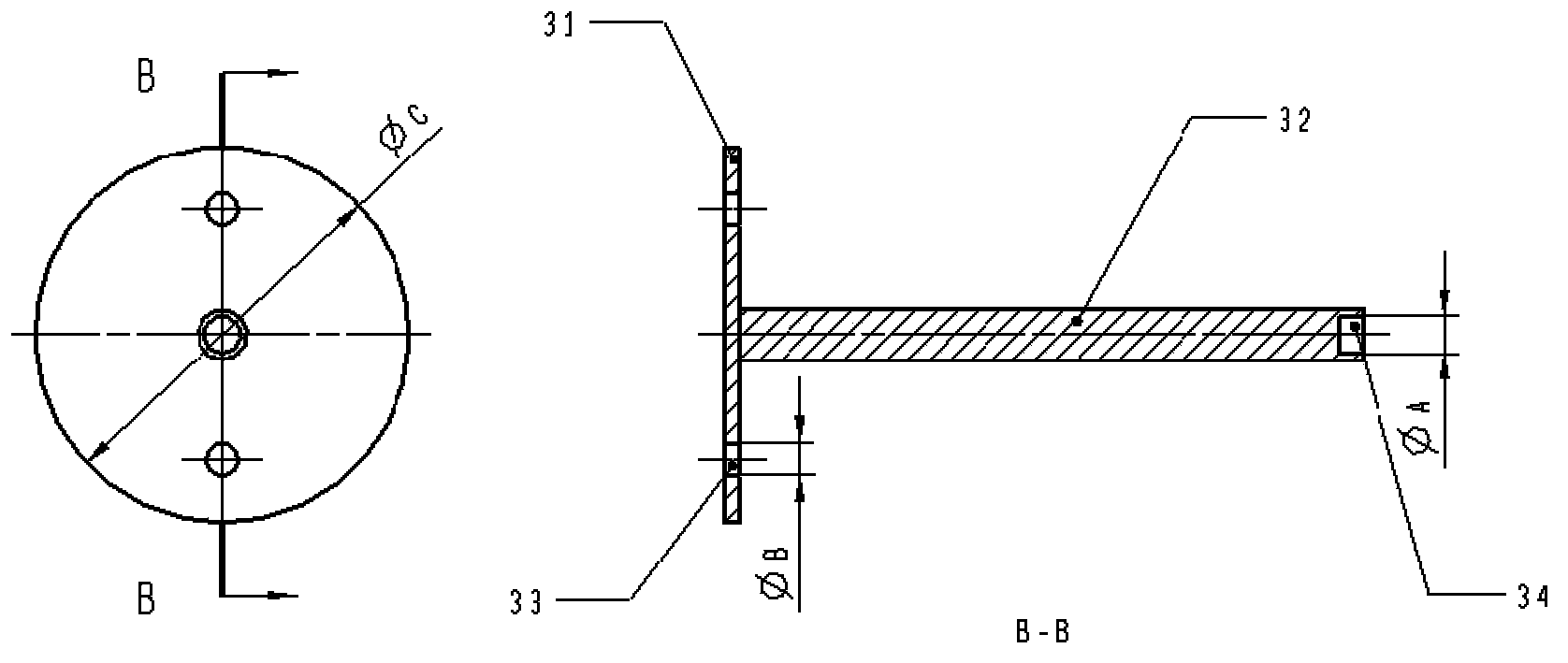
[0149] The non-contact high-precision calibration method of the robot base coordinate system of the present invention adopts the calibration finger tooling installed with the measuring ball, and the calibration finger tooling includes a space point positioning device, a robot flange extension rod, and a circular fitting sleeve; Refers to the installation of the tooling on the robot flange or tool body; the center of the measuring ball (that is, the center point of the measuring ball as the calibration point) is measured by the laser measuring instrument; the laser measuring instrument has a coordinate system of the laser measuring instrument, and the laser measuring instrument The measured data is processed through the algorithm of coordinate transformation, and the relationship between the coordinate system of the laser measuring instrument and the base coordinate system of the robot is established, so as to perform non-contact high-precision calibration of the base coordinate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More