

Soft robot based on SMA and SSMA driving
A robot and robot system technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited throughput, low output volume ratio, lack of stability, flexibility and environmental adaptability, etc., to achieve Precise control, good application prospects, and the effect of increasing flexibility and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The soft robot adopts dual SSMAs drive units for precise control; the flexible structure module of the soft robot is composed of 3D printed silicone shell and various springs of structural joints; the SMA drive module of the foot can realize the forward and backward drive of the foot structure. The three modules work together to complete the movement of the soft robot.
[0030] SSMAs Drive Feedback Unit Module
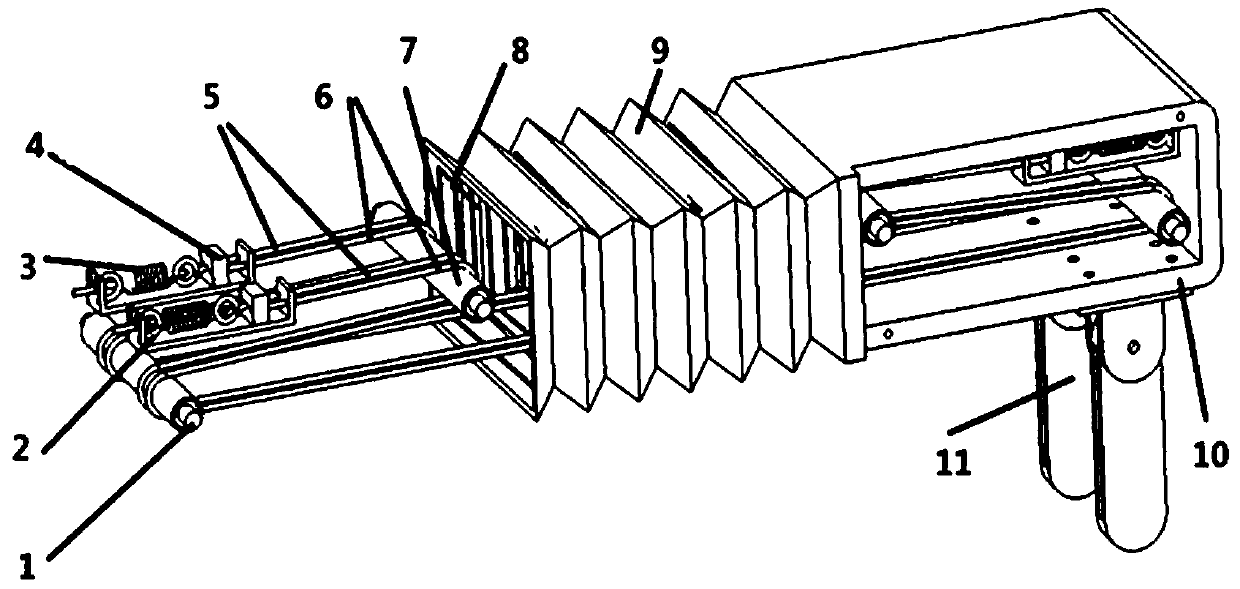
[0031] Such as Figure 4 Shown is a schematic diagram of the winding of the alloy wire in the SSMAs drive feedback unit. Due to the scattered distribution of the pulley rods, more SSMA and SMA alloy wires can be distributed inside the robot, making the system more sensitive.
[0032] Such as Figure 5 A schematic diagram of the SSMAs drive unit is shown. The robot has two sets of symmetrical SSMAs driving units. One SMA and one SSMA are connected in parallel on the pulley rod, and the two ends are connected by micro springs and other components, which is ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More