

A Distributed Multi-Sensor Multi-Target Passive Localization Method Based on Projection Strategy
A multi-sensor, passive positioning technology used in positioning, instruments, radio wave measurement systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] As a preferred embodiment of the present invention, this embodiment mainly adopts the method of simulation experiment for verification, and all steps and conclusions are verified on MATLABR2012a. Concrete embodiment steps are as follows:
[0053] A. Preparing the sensors: dispersed within a specific detection area sensors, the number of sensors satisfies ;
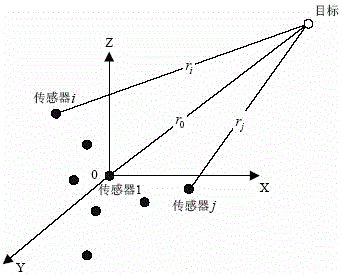
[0054] B. Set the coordinate system: set a Cartesian rectangular coordinate system, the origin of the coordinate system is located at the first sensor, and the sensor is at The position coordinates of the Cartesian rectangular coordinate system are , ,in, ; Sensors 2, 3, and 4 are located at km, km and At km, sensors 5~11 are randomly scattered in the triangular area determined by sensors 2, 3 and 4; the detection area of the sensors is [XX,YY,ZZ]=[50,50,10]km;
[0055] C. Obtain data: take the first sensor as the main station, other sensors as auxiliary stations, and slave sensors , Rea...
Embodiment 2
[0071] As a preferred embodiment of the present invention, this embodiment mainly adopts the method of simulation experiment for verification, and all steps and conclusions are verified on MATLABR2012a. Concrete embodiment steps are as follows:
[0072] A. Preparing the sensors: dispersed within a specific detection area sensors, the number of sensors satisfies ;
[0073] B. Set the coordinate system: set a Cartesian rectangular coordinate system, the origin of the coordinate system is located at the first sensor, and the sensor is at The position coordinates of the Cartesian rectangular coordinate system are , ,in, ; Sensors 2, 3, and 4 are located at km, km and At km, sensors 5~21 are randomly scattered in the triangular area determined by sensors 2, 3 and 4; the detection area of the sensors is [XX,YY,ZZ]=[50,50,10]km;
[0074] C. Obtain data: take the first sensor as the main station, other sensors as auxiliary stations, and slave sensors , Rea...
Embodiment 3
[0090] As a preferred embodiment of the present invention, this embodiment mainly adopts the method of simulation experiment for verification, and all steps and conclusions are verified on MATLABR2012a. Concrete embodiment steps are as follows:
[0091] A. Preparing the sensors: dispersed within a specific detection area sensors, the number of sensors satisfies ;
[0092] B. Set the coordinate system: set a Cartesian rectangular coordinate system, the origin of the coordinate system is located at the first sensor, and the sensor is at The position coordinates of the Cartesian rectangular coordinate system are , ,in, ; Sensors 2, 3, and 4 are located at km, km and At km, sensors 5~31 are randomly scattered in the triangular area determined by sensors 2, 3 and 4; the detection area of the sensors is [XX,YY,ZZ]=[50,50,10]km;
[0093] C. Obtain data: take the first sensor as the main station, other sensors as auxiliary stations, and slave sensors , Rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More