

Method for planning space manipulator tail end effector avoidance path based on ant colony algorithm
A space manipulator, ant colony algorithm technology, applied in the field of aerospace control, can solve the problems of genetic algorithm difficult to find a feasible path, limited application, slow convergence speed, etc., to avoid falling into local optimum easily, avoid slow convergence speed, avoid The effect of short obstacle paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
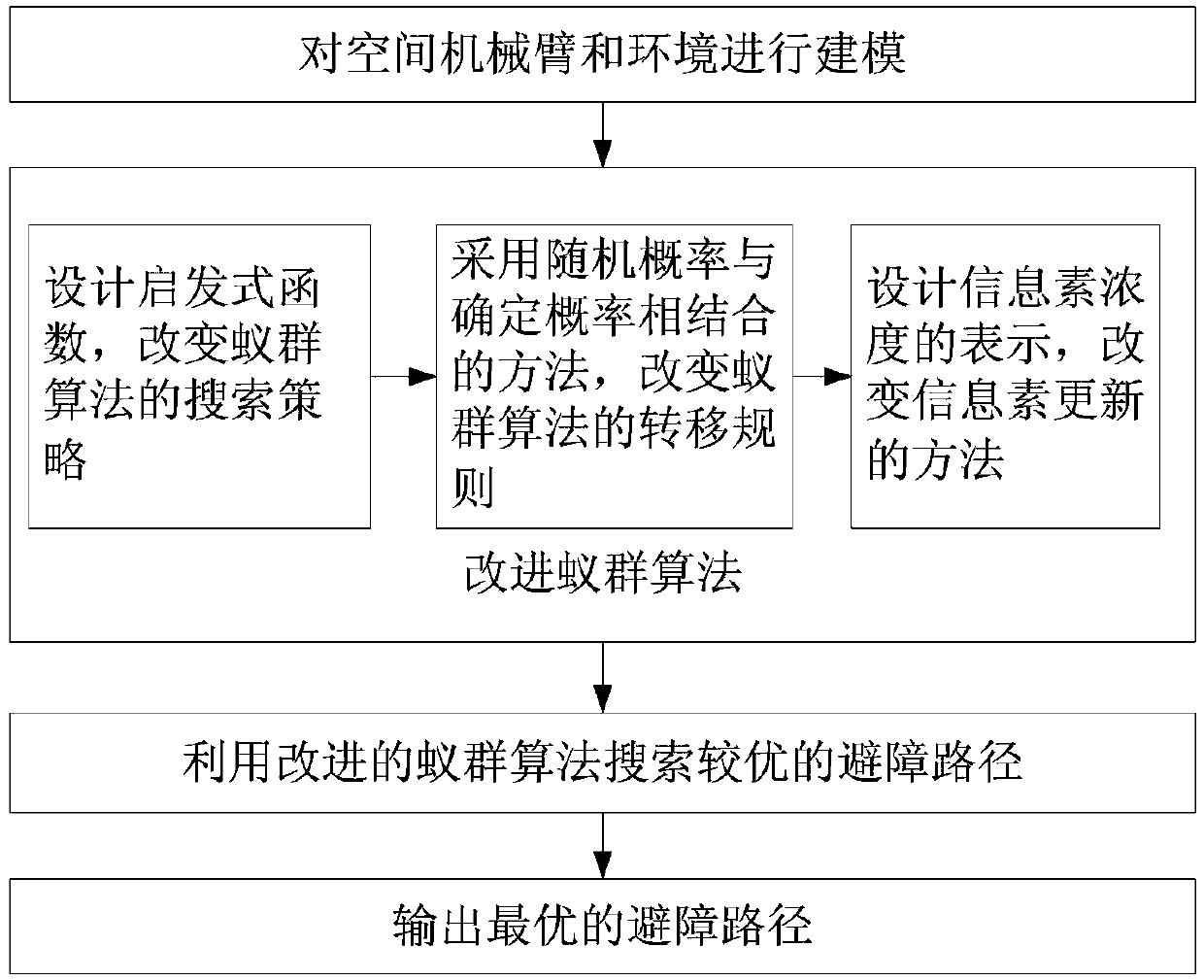
Method used
Image

Examples
Embodiment 1
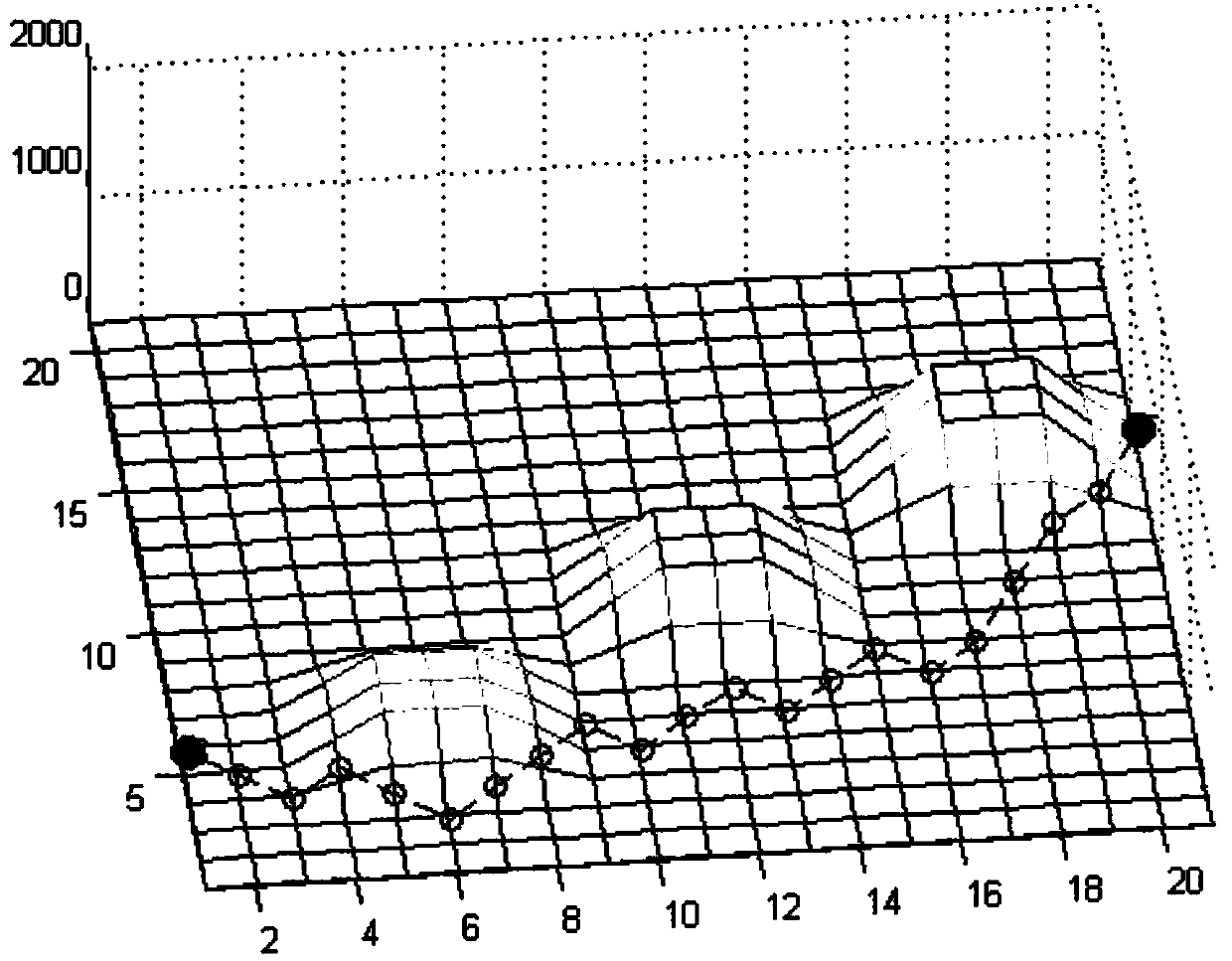
[0052] The embodiments of the present invention are implemented on the premise of the technical solutions of the present invention, and detailed implementation methods and specific operation processes are given, but the protection scope of the present invention is not limited to the following embodiments. The specific implementation steps are:
[0053]Step 1: First establish the environment model, make the cube ABCDEFGH in the three-dimensional coordinate system, first divide the planning space ABCDEFGH equally along the edge AB to obtain n+1 planes, and then divide the n+1 planes into m equal parts along AD, Carry out l equal division along the edge AE, and solve the intersection point inside. Then set the coordinates of the three obstacles as: (4,4,1), (4,8,1), (8,4,1), (8,8,1), (5,5,4 ), (7,5,4), (5,7,4)(7,7,4); (10,8,1.25), (10,12,1.25), (14,8,1.25), ( 14,12,1.25), (11,9,5), (11,11,5), (13,9,5), (13,11,5); (16,12,1.5), (16, 16,1.5), (20,12,1.5), (20,16,1.5), (17,13,6), ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More