

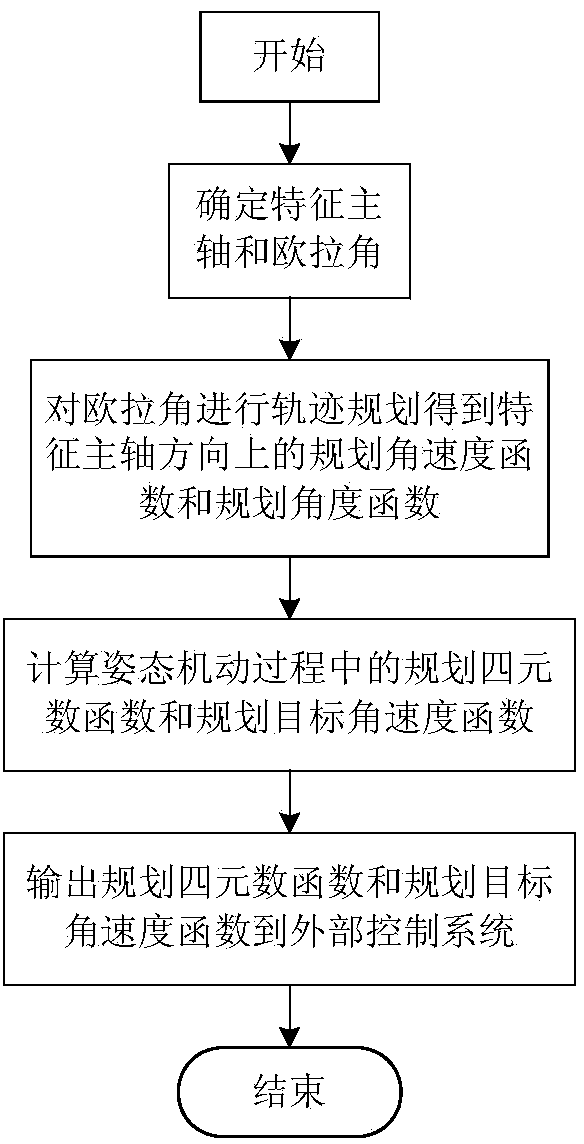
Trajectory planning method for attitude maneuver
An attitude maneuvering and trajectory planning technology, applied in attitude control and other directions, can solve the problems of difficult sequence selection, reduce the rapidity of attitude maneuvering, and inconsistency in the time when the trajectory planning of each axis is in place. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
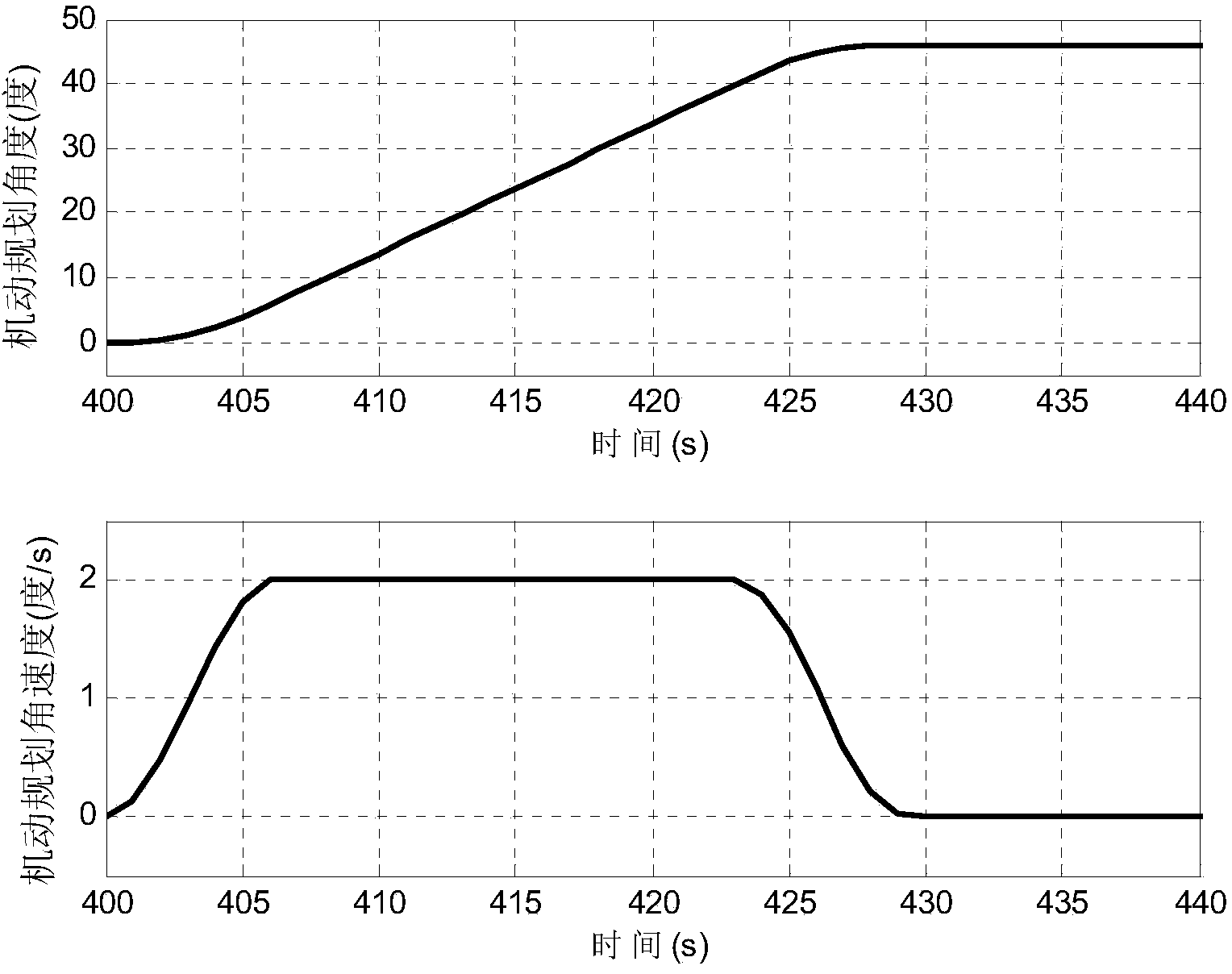
[0071] A sun-synchronous orbit satellite with an orbital altitude of 700km, an orbital inclination of 98°, and a maximum angular velocity of a star maneuver of 2° / s.
[0072] The satellite performs a two-axis maneuver in which:
[0073] (1) Initial attitude: the initial values of roll angle, pitch angle, and yaw angle are all 0°;
[0074] (2) Maneuvering target attitude: roll angle 45°, pitch angle 10°, yaw angle 0°, that is, only roll angle and pitch angle are used for maneuvering.
[0075] (3) Maneuvering process: first, maneuver from the initial attitude to reach the target attitude; then, maneuver back to the initial attitude after the target attitude is stable for a period of time.
[0076] Carry out trajectory planning according to the trajectory planning method of the present invention, and output the planning quaternion function q r (t) and planning target angular velocity function ω r (t) to the external attitude control system to realize that the star completes ...
Embodiment 2
[0081] A sun-synchronous orbit satellite with an orbital altitude of 700km, an orbital inclination of 98°, and a maximum angular velocity of a star maneuver of 2° / s.
[0082] The satellite performs a three-axis maneuver in which:
[0083] (1) Initial attitude: the initial values of roll angle, pitch angle, and yaw angle are all 0°;
[0084] (2) Maneuvering target attitude: roll angle 45°, pitch angle 10°, yaw angle 10°.
[0085] (3) Maneuvering process: first, maneuver from the initial attitude to reach the target attitude; then, maneuver back to the initial attitude after the target attitude is stable for a period of time.
[0086] Carry out trajectory planning according to the trajectory planning method of the present invention, and output the planning quaternion function q r (t) and planning target angular velocity function ω r (t) to the external attitude control system to realize that the star completes attitude maneuvering along the trajectory planned by the present...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More