

Real-time navigation system and real-time navigation method for underwater structure detection robot
A technology for underwater robots and underwater structures, which is used in mapping and navigation, navigation, and navigation through velocity/acceleration measurement, etc., and can solve problems such as high cost, low reliability, and large navigation delay.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
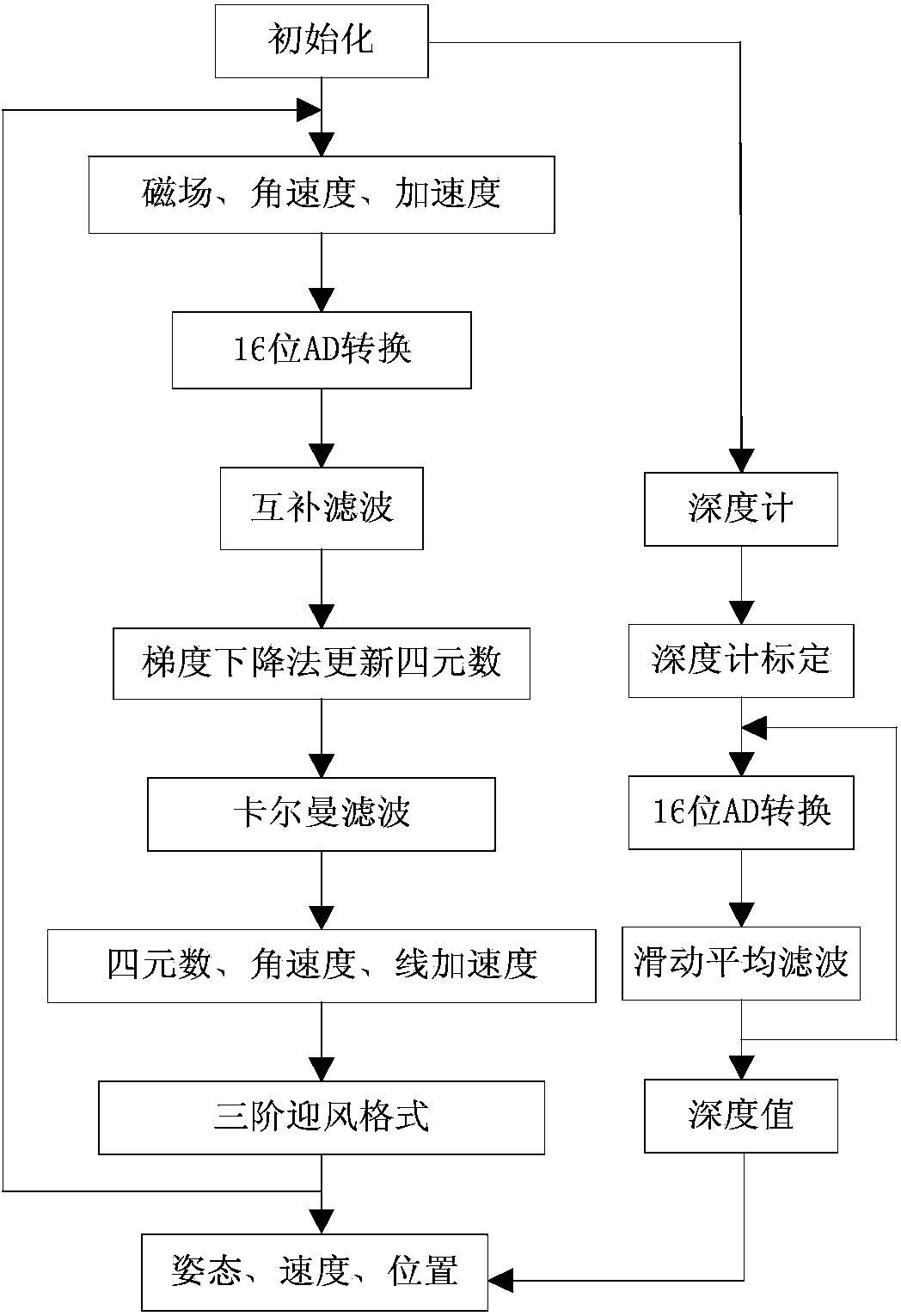
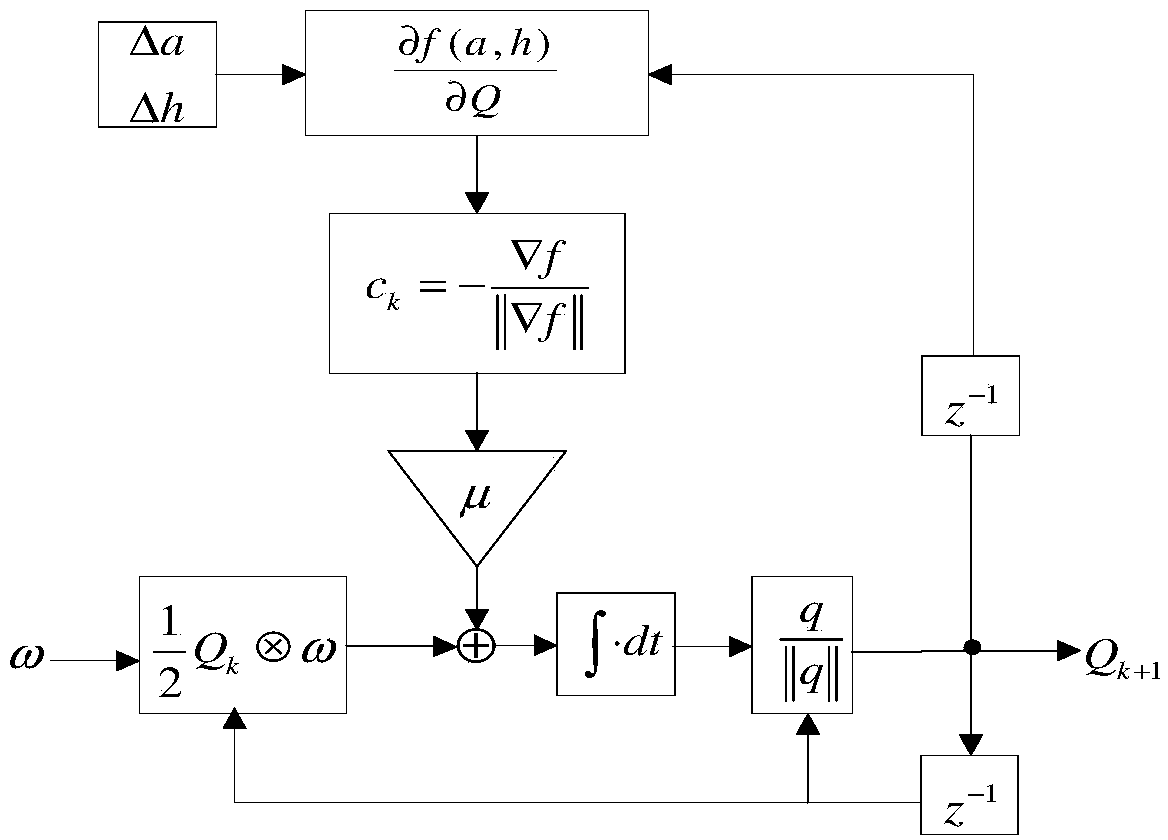
[0062] The basic idea of the present invention is, based on micro-electromechanical equipment, using quaternion gradient descent method, complementary filtering, and Kalman filtering to fuse navigation information to obtain the attitude information of the underwater robot, and use the third-order upwind method to solve the speed and position of the underwater robot , using the moving average filter to calculate the underwater robot's dive depth can reduce the cost and improve the accuracy to a certain extent.
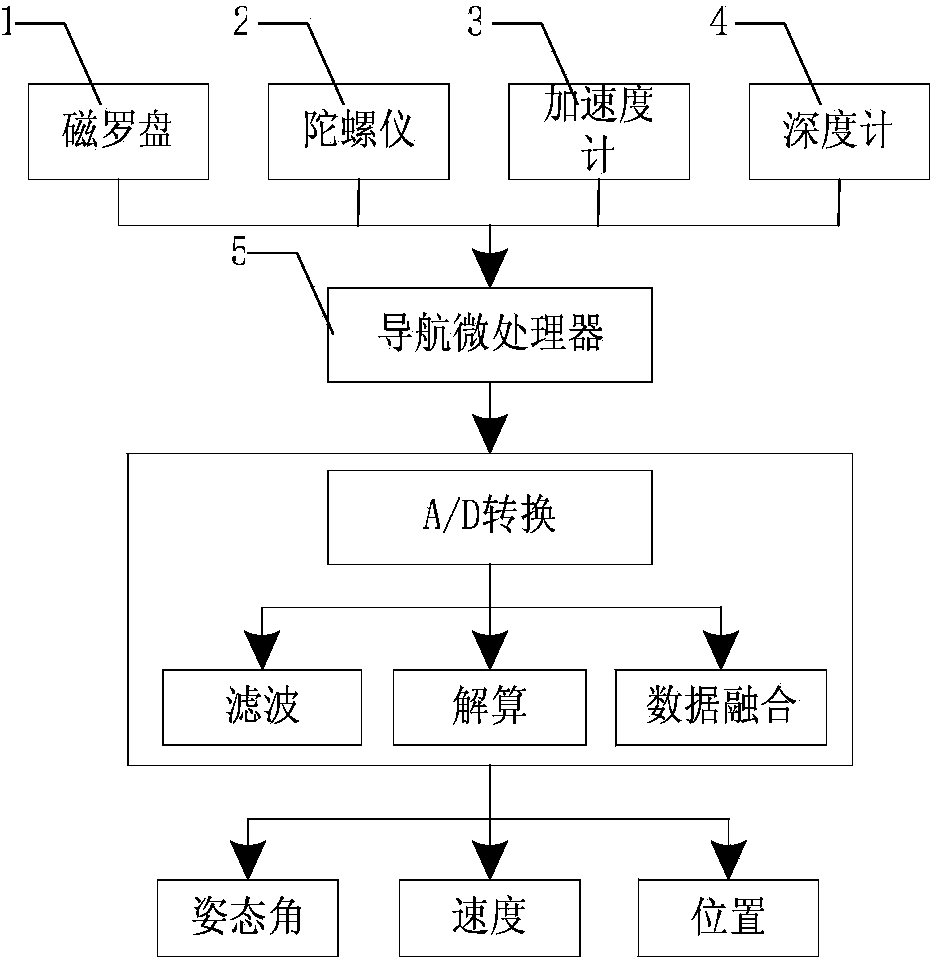
[0063] Such as figure 1 As shown, a robot navigation system for underwater structure detection consists of a magnetic compass 1, a gyroscope 2, an accelerometer 3, a depth gauge 4, and a navigation microprocessor 5. The magnetic compass 1, gyroscope 2, and accelerometer 3 and the depth gauge 4 collect the magnetic field strength, angu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More