

High precision real-time contour error estimation method
A contour error, high-precision technology, applied in the direction of instruments, digital control, control/regulation systems, etc., can solve the problem of low estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific implementation manner of the present invention will be described in detail in conjunction with the technical scheme and the accompanying drawings.
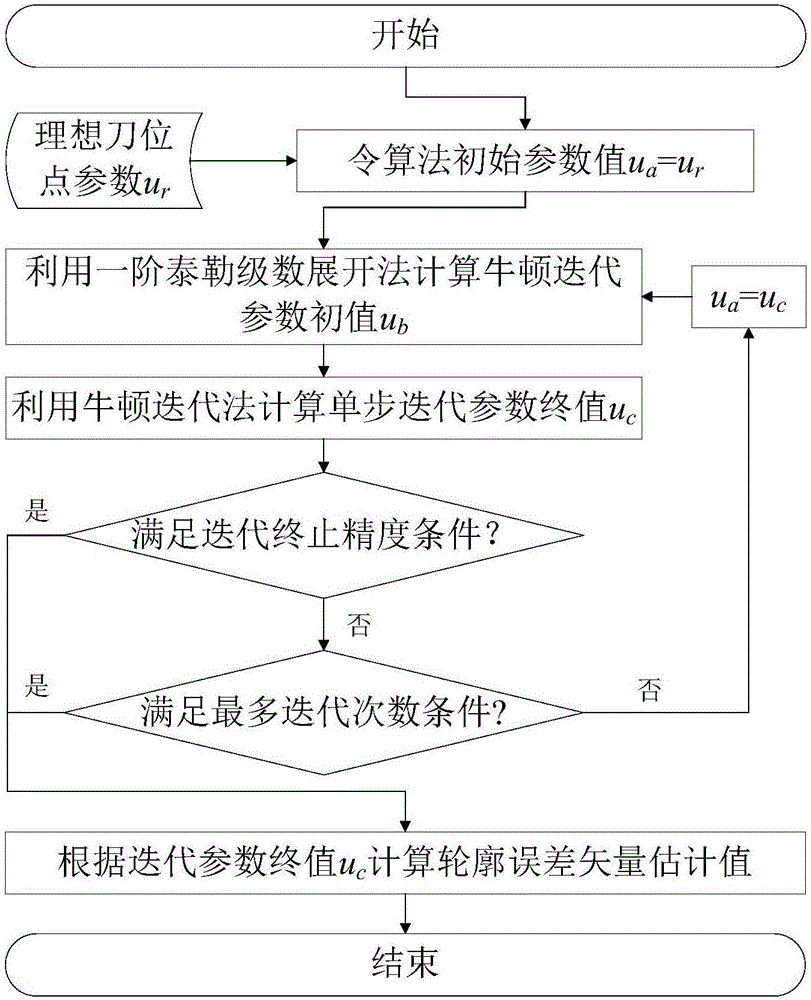
[0034] Due to servo lag and external disturbances in the CNC system, it will cause a large machining trajectory contour error. In the process of direct interpolation of the parameter curve, the ideal machining contour is a free curve, which is difficult to calculate the contour error in real time and with high precision, which limits the contour control. Effect. Accordingly, a real-time high-precision contour error estimation method based on initial value regenerative Newton iteration is invented, with figure 1 Flow chart of the estimation method.
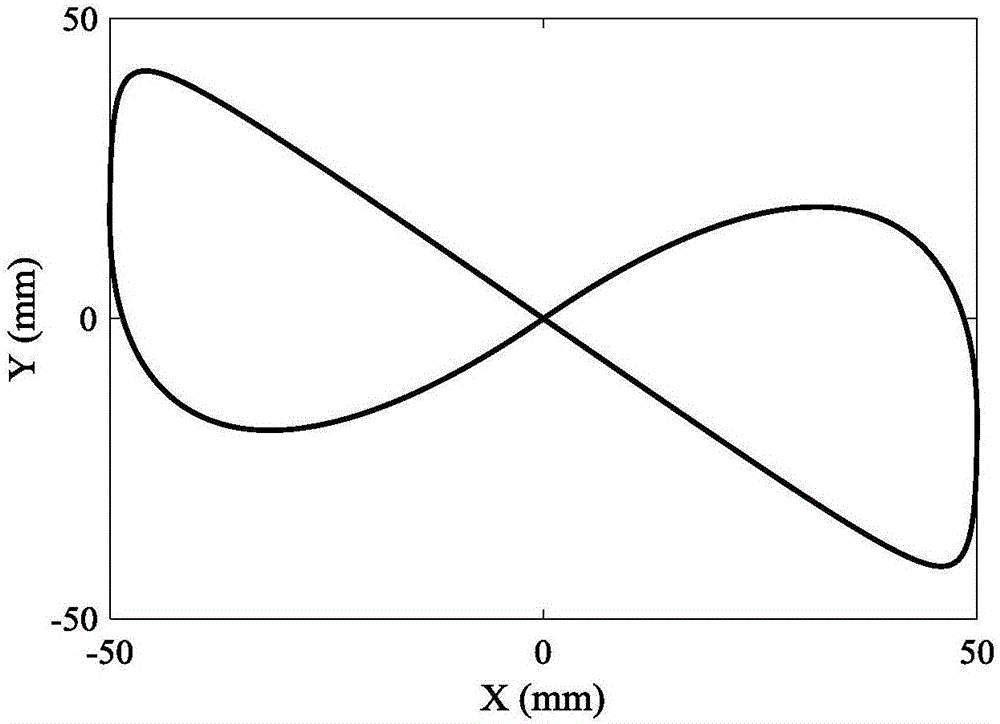
[0035] attached figure 2 The geometric model diagram of the "inverted eight" shaped tool path is attached figure 2 The shown "inverted eight" shaped non-uniform rational B-spline tool path profile is an example, and the specific implementation process of the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More