

Spacecraft posture confirming method based on Euler-q algorithm and DD2 filtering
A determination method and spacecraft technology, applied in the direction of integrated navigator, navigation calculation tool, etc., can solve the problems of large calculation amount, reduced model accuracy, difficult online calculation, etc., to improve calculation speed, ensure attitude accuracy, and calculate speed. quick effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
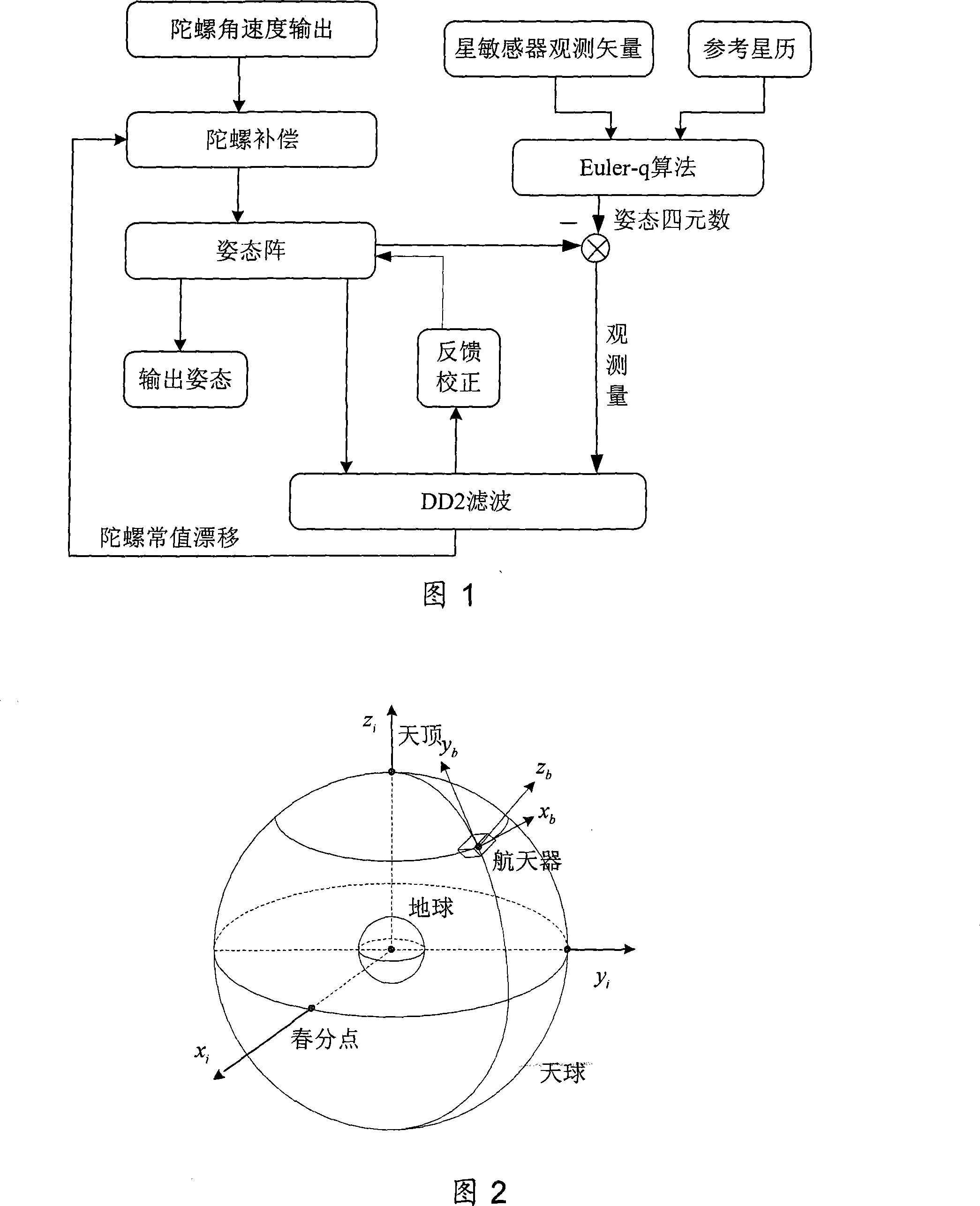
[0016] As shown in Figures 1 and 2, the specific implementation method of the present invention is as follows:
[0017] 1. The attitude of the spacecraft is sensed by the gyroscope, and the three-axis angular rate is output, and the attitude array is updated using the angle increment algorithm to obtain the spacecraft in the earth-centered inertial coordinate system, that is, the earth's center is the origin, and the pointing to the zenith is z i , pointing to the vernal equinox at x i ,y i with x i ,z i Real-time attitude under the right-handed spiral: heading angle , pitch angle θ, roll angle γ. The gyro output attitude frequency is determined by the actual gyro sampling rate. In this example, the output frequency is 100HZ;
[0018] The initial attitude quaternion q matrix [q 1 q 2 q 3 q 4 ], subscript 0 is the initial value:
[0019]
[0020] The update matrix is:
[0021] q ( n + 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More