

3D point cloud data processing method
A data processing and point cloud data technology, applied in image data processing, special data processing applications, 3D modeling, etc., can solve problems such as low efficiency and cumbersome steps, and achieve simple data structure, accurate clustering results, and real-time performance Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
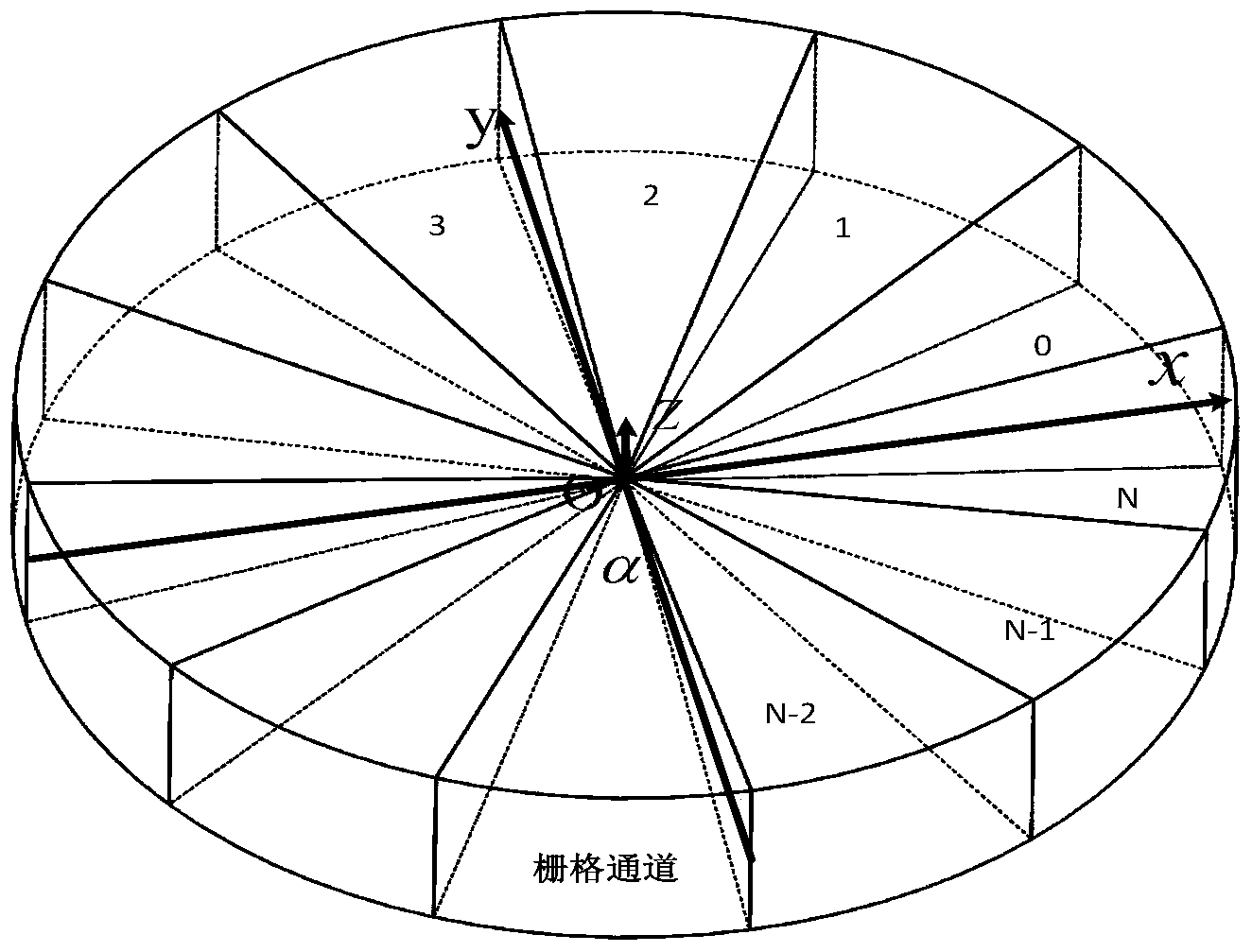
[0035] The method adopted in the present invention is carried out on a sensor mounted in such a way that the axis of rotation of the sensor is perpendicular to the ground. Define the OXYZ coordinate system as a rectangular coordinate system fixed to the sensor, the OZ axis is the vertical center axis of the sensor, perpendicular to the ground plane, the OX axis is the horizontal ray in the scanning starting plane, and the OY axis is composed of the X axis and the Z axis Determined according to the right-hand spiral rule, where the Z axis can reflect the height value of the scanned object.
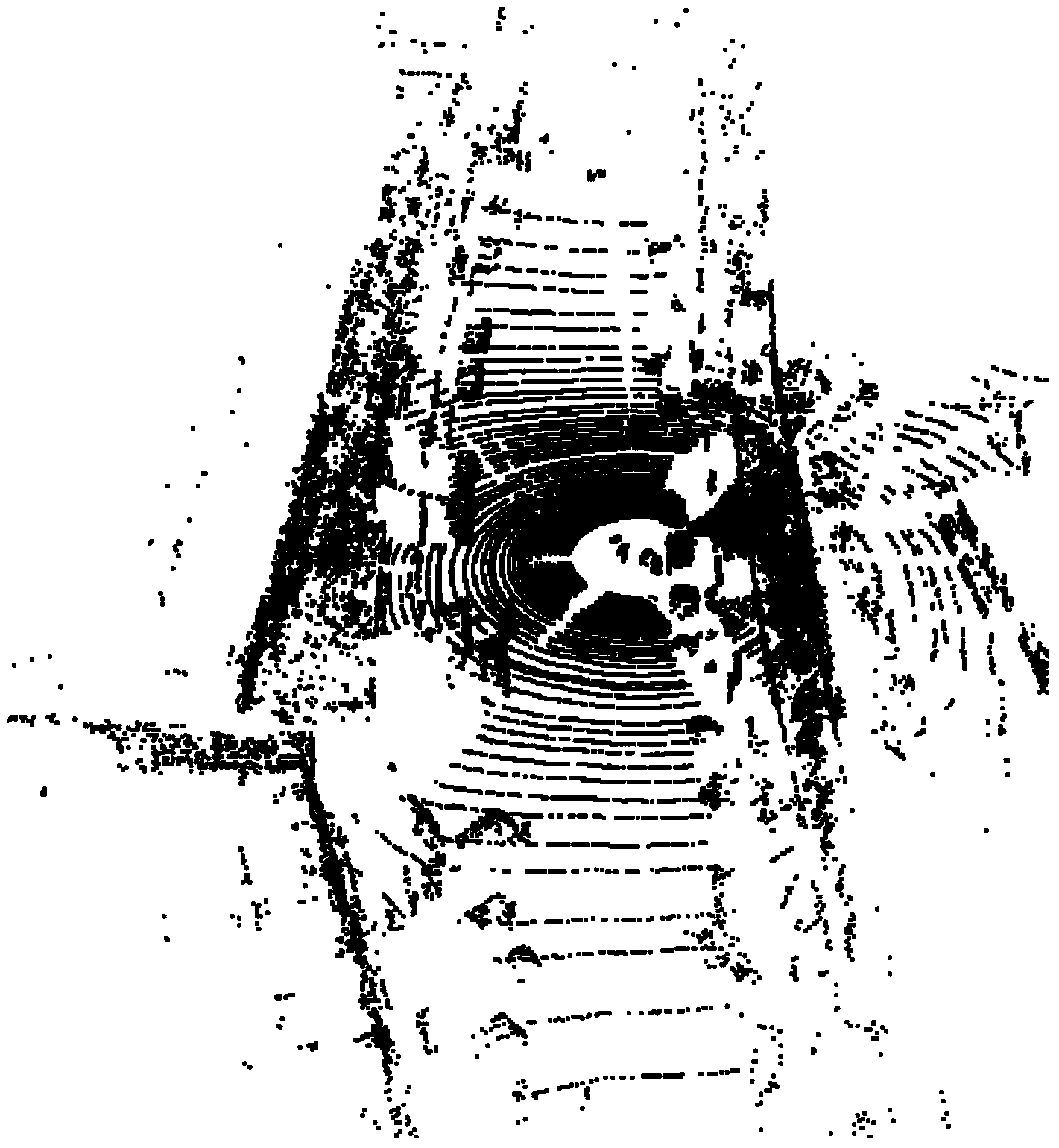
[0036] The surrounding environment is sampled once by the sensor as described above, and the following results are obtained: figure 1 The point cloud data image of the real-world scene to be processed is shown.
[0037] The processing of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More