

Four-axis swing-arm articulated robot
A robot and arm joint technology, applied in the field of four-axis swing arm joint robot, can solve the problems of easy damage of communication lines, low safety factor, high cost and unsuitable for promotion, and achieve the effect of improving accuracy and safety factor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples cited are only used to explain the present invention and not used to limit the scope of the present invention.
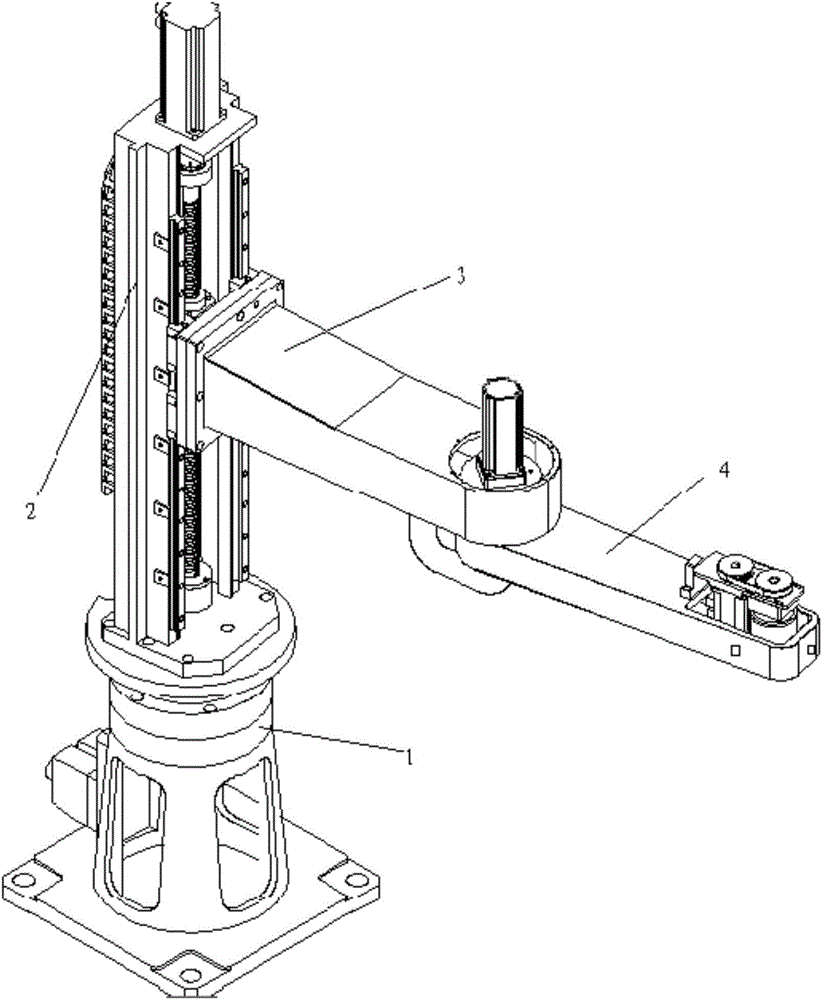
[0031] Such as figure 1 Shown is a schematic diagram of the structure of the four-axis swing arm articulated robot of the present invention. It includes a tandem machine structure composed of a base assembly 1, a two-axis assembly 2, a three-axis assembly 3 and a four-axis assembly 4 for handling workpieces. The two-axis assembly 2 is vertically fixed on the base assembly 1. Above, the base assembly 1 drives the two-axis assembly 2 to rotate axially, the three-axis assembly 3 is arranged horizontally, and one end of the three-axis assembly 3 is slidably connected to the two-axis assembly 2. Moving vertically, the four-axis assembly 4 is also arranged horizontally, one end of which is rotatably connected to the end of the three-ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More