

Robot distributed type representation intelligent semantic map establishment method
A semantic map and robot technology, applied in directions such as road network navigators, can solve the problems of decreased positioning accuracy, failure, affecting the reliability of semantic maps, etc., and achieve the effect of improving precision, improving accuracy, and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in further detail below in conjunction with the accompanying drawings.
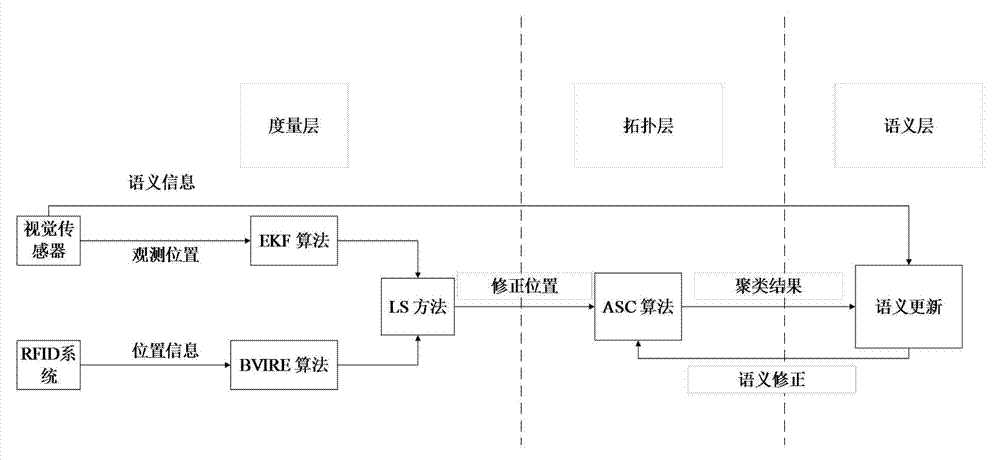
[0036] Such as Figure 1-9 Shown, the frame structure of the method involved in the present invention is as figure 1 shown, including the following steps:
[0037] Step 1: Collect environmental images to realize robot vision positioning.
[0038] Step 1.1, the mobile robot collects environmental images through the binocular vision sensor, and obtains a collection of artificial landmarks.
[0039] Step 1.2, taking into account the polar geometric constraints, based on the principle of triangulation, using the parallax method to obtain the depth information of artificial landmarks in the image, and calculate the global coordinates of the landmarks.
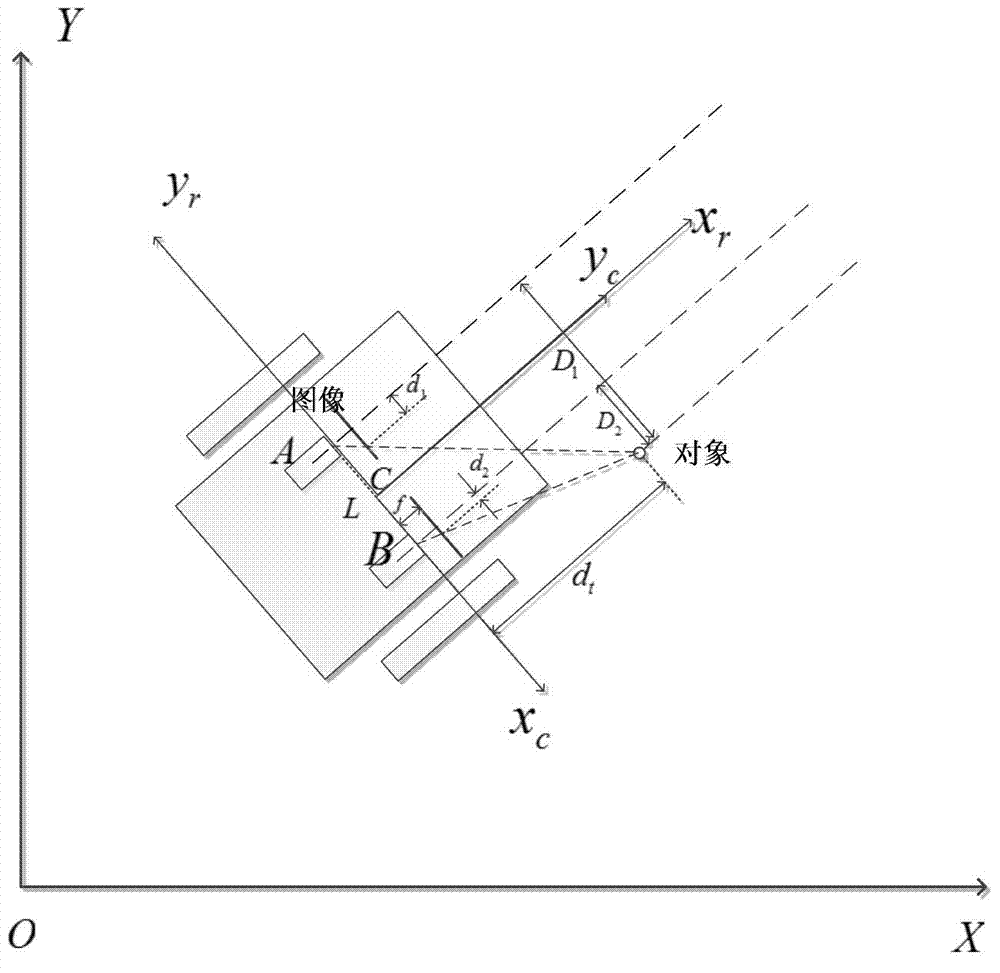
[0040] (1) The mobile robot has two independent driving wheels and is equipped with a binocular camera on the fuselage. The schematic diagram of the robot model is shown in figure 2 shown. Based on geometry, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More