

Parameter acqusition system and method during stair climbing of four-tentacle tracked robot
A crawler robot and parameter acquisition technology, applied in the field of robot vision, can solve the problems of staircase parameter acquisition and acquisition, and achieve good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
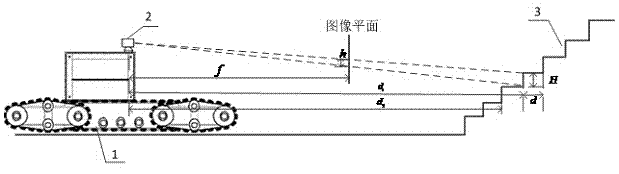
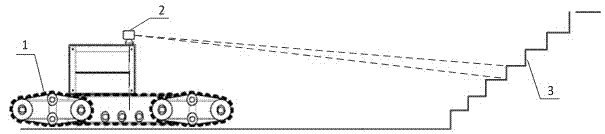
[0030] see figure 2 , this four-antenna crawler robot stair climbing parameter acquisition system comprises a four-tentacle crawler robot (1) equipped with a control computer and a Kinect XBOX360 camera (2) of Microsoft Corporation, characterized in that: the Kinect XBOX360 camera (2) of Microsoft Corporation ) is installed on the four-antenna crawler robot (1), and connected to the control computer of the four-antenna crawler robot (1) through the USB interface to obtain the RGB color and depth images captured by the Kinect XBOX360 camera (2) on the stairs (3), and the processed information Fusion, calculate the relevant parameters of the staircase (3).
Embodiment 2
[0032] see figure 1 , figure 2 , image 3 and Figure 4 , this four-antenna crawler robot stair-climbing parameter acquisition method adopts the above-mentioned four-antenna crawler robot stair-climbing parameter acquisition system to calculate the stair parameters, and is characterized in that: its operation steps are as follows:
[0033] (2.1) Camera calibration: Use Zhang Zhengyou’s camera calibration method to obtain the parameter matrix K of the Kinect XBOX360 camera (2):
[0034] ,
[0035] Among them: f—the focal length of the camera; s—the distortion coefficient of the camera; —principal point offset;
[0036] (2.2) Image acquisition: open the Kinect XBOX360 camera (2) to obtain the RGB image and depth image data of the Kinect XBOX360;
[0037] (2.3) Create each calculation node: the image data of the Kinect XBOX360 camera (2) includes RGB image and depth image, and each calculation node calculates the information related to the stairs (3) from the above ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More